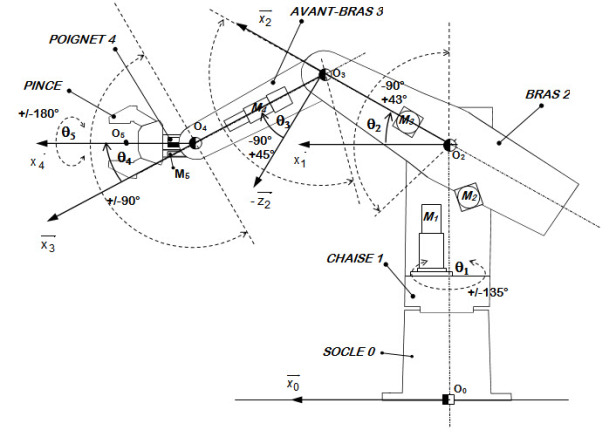
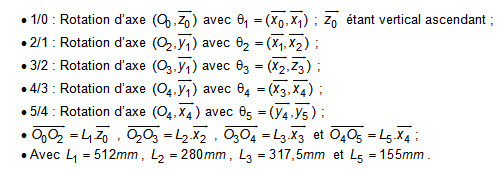
Le paramétrage de la position du robot est proposé ci-dessous.
Les figures de changement de base illustrant les paramètres d'orientation, excepté une seule, sont données ci-dessous :