
Étape 2 : déclarer les liaisons entre les solides
– ajouter une liaison. Pour cela :
cliquer droit sur Liaisons, et sélectionner ajouter, puis sélectionner la liaison souhaitée ;
sélectionner les 2 pièces en liaison en cliquant en premier sur la pièce de référence, puis sur la pièce en mouvement afin d'avoir un paramètre de mouvement orienté de la même manière que sur le schéma cinématique utilisé pour une éventuelle simulation manuelle (exemple : pour un paramètre angulaire 3 puis 6 si
 ou pour un paramètre linéaire 2 puis 3 si
ou pour un paramètre linéaire 2 puis 3 si
 ) ;
) ;
| 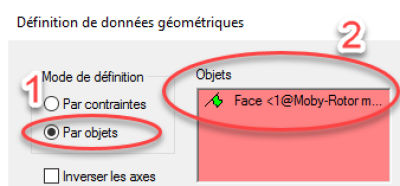 |
3 : lorsque les objets sélectionnés sont corrects, un drapeau vert est affiché à côté d'eux : | 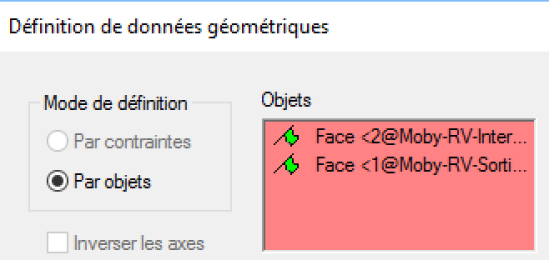 |
4 : avant de terminer la création de la liaison, vérifier l'orientation du repère de liaison, qui vient d'être créé. Ce repère apparaît alors sur la zone graphique avec une simple flèche pour l'axe 1, une double flèche pour l'axe 2, une triple flèche pour l'axe 3 (voir photo du repère ci-contre). Pour les liaisons à axe (pivot, pivot glissant, hélicoïdale), l'axe de la liaison est toujours l'axe 1. Pour la liaison glissière, la direction de la liaison est toujours suivant l'axe 1. Si besoin, sélectionner « Inverser les axes » pour que cet axe 1 soit orienté dans le même sens que celui sur le schéma cinématique utilisé pour une éventuelle simulation manuelle ;
|  |
– vérifier les liaisons créées dans l'onglet Meca3D. Pour cela :
| 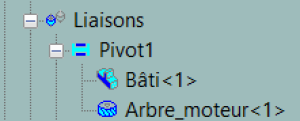 |
cliquer sur une liaison met en surbrillance sur la zone graphique, les pièces et le repère de cette liaison.
Si l'axe 1 d'une liaison n'est pas dans le bon sens, cliquer droit sur cette liaison et choisir option/inverser les axes ;
cliquer sur l'icône « reconstruire »
 placé en haut de la fenêtre ;
placé en haut de la fenêtre ;
– double cliquer sur le nom d'une liaison afin de la renommer explicitement : |  |
Graphe de structure
– Cliquer droit sur Analyse / Graphe de structure afin de vérifier toutes les liaisons entre les différentes solides
NB : il est possible de déplacer les pièces dans le graphe de structure, en cliquant dessus...





