
Étape 1 : choisir la position de référence Meca3D et positionner le mécanisme dans cette position
1.1 Choisir la position de référence Meca3D
Afin de pouvoir comparer les résultats entre simulation manuelle (calcul à la main), simulation numérique (calcul avec un logiciel), et expérimentation, il est impératif que les zéros des différents paramètres de mouvement correspondent entre ces 3 études.
Or, Meca3D considère la position à l'écran, comme sa position de référence, c'est-à-dire la position où tous les paramètres de mouvement de ses liaisons sont nuls.
Ainsi, avant de lancer les calculs, il est donc nécessaire de bien veiller à choisir cette position de référence Meca3D, puis de positionner le mécanisme dans cette position. Par rapport aux paramètres de mouvement définis sur le schéma cinématique utilisé pour une éventuelle simulation manuelle, la position de référence Meca3D doit correspondre à la position où :
- tous ces paramètres de mouvement sont nuls (pour les mécanismes en chaîne ouverte) ;
- le maximum de ces paramètres de mouvement sont nuls (pour les mécanismes en chaîne fermée) .
En effet, les mécanismes en chaîne fermée n'ont malheureusement pas de position où TOUS les paramètres de mouvement (définis sur le schéma cinématique utilisé pour une éventuelle simulation manuelle) seraient nuls.
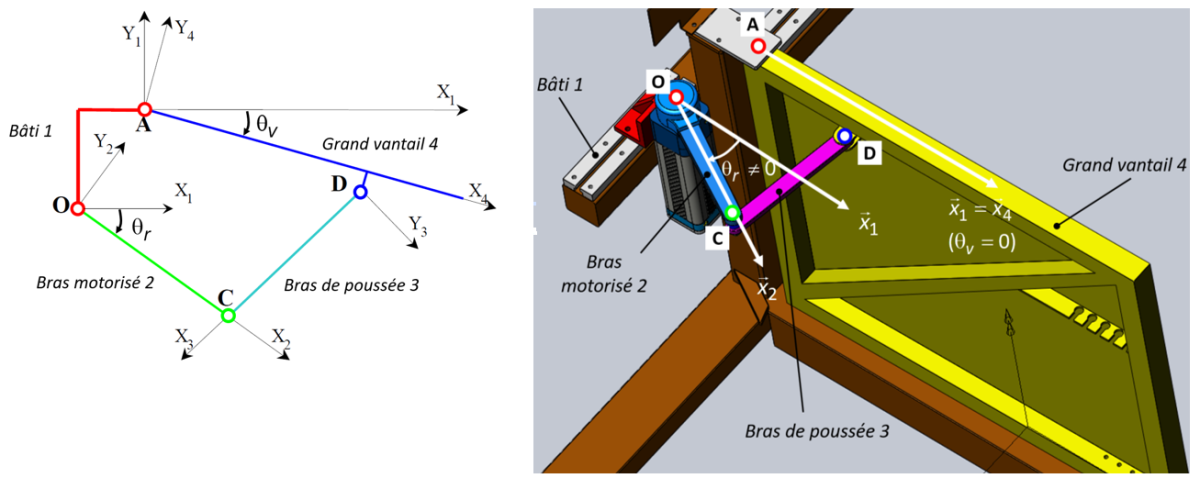
Exemple : portail du laboratoire
On s'aperçoit que dans Meca3D, si on positionne le grand vantail 4 fermé (
 ), alors le bras motorisé 2 n'est pas parallèle à ce dernier (
), alors le bras motorisé 2 n'est pas parallèle à ce dernier (
 ).
).
Dans la partie traitement des données (après un export vers Pyzo - python), il faudra donc « recaler
 .» en imposant (
.» en imposant (
 ).
).
Remarque : Ne pas confondre la position de référence Meca3D avec la position initiale du mouvement
En effet, lors d'une simulation, un mouvement peut ne pas partir de 0. Exemple : il est possible de simuler le mouvement d'un bras de robot allant de +30° à +60°. Sa position initiale est donc +30°. Cette position initiale du mouvement est déduite de la position de référence (celle affichée à l'écran).
1.2 Positionner le mécanisme dans la position de référence Meca3D
Pour cela, dans l'onglet Assemblage de SolidWorks (voir image ci-contre), |  |
positionner et orienter une pièce : – de façon approximative en utilisant les outils déplacer et pivoter (voir image ci-contre). remarque : SolidWorks ne gère pas les interférences de volume, deux pièces peuvent se superposer... |  |
– OU de façon précise en ajoutant des contraintes (angle ou distance) pour imposer à zéro un paramètre de mouvement angulaire ou linéaire. Pour cela, cliquer sur le bouton 1 : sélectionner deux surfaces entre lesquelles l'angle ou la distance sont définis (vous pouvez utiliser la touche "suppr" pour effacer une surface sélectionnée mais non souhaitée) Veiller à sélectionner des surfaces et non pas des arrêtes ; 2 : sélectionner la contrainte souhaitée : "angle" (pour paramètre angulaire) ou "distance" (pour paramètre linéaire) 3 : sélectionner le sens en cliquant sur un des deux icônes 4 : valider en cliquant sur |  |
remarque 1 : afin de sélectionner une surface qui est non visible, il est possible ponctuellement de cacher une pièce (cliquer droit sur celle-ci, puis sélectionner l'icône cacher les composants |  |
Pour la remontrer, il suffira de cliquer droit sur celle-ci dans l'arbre de création et de sélectionner l'icône montrer les composants ![]() .
.
remarque 2 : juste après avoir créé une contrainte, il ne sera plus possible de déplacer manuellement une pièce par rapport à l'autre. Mais pas d'inquiétude, Meca3D le fera automatiquement.
– vérifier les contraintes créées. Pour cela :
| 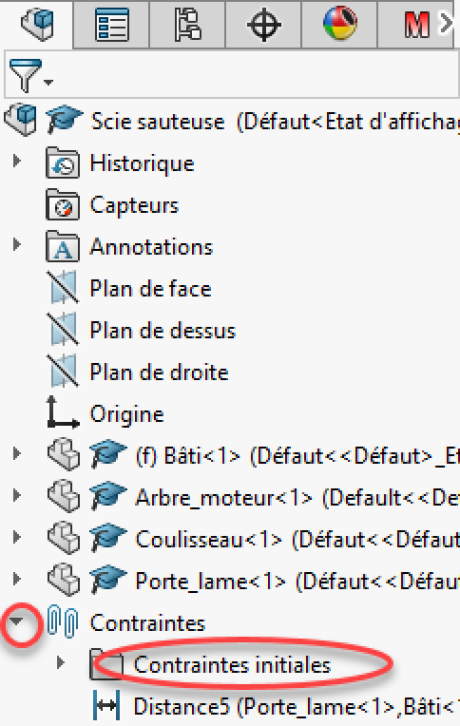 |
– pour rouvrir une contrainte qui a été fermée, en vue de sa modification, cliquer droit sur le nom de celle-ci dans l'arbre de création, puis choisir l'icône « éditer la fonction » ![]() ;
;




