Étape 2 : lancer le calcul des différentes positions
Avant de voir bouger le mécanisme et d'obtenir des valeurs, le logiciel doit calculer les positions successives que ce dernier va prendre.
Attention :
Mais avant chaque nouveau calcul, il est nécessaire de repositionner les repères des liaisons au bon endroit. Pour cela, cliquer sur l'icône « reconstruire » ![]() placé en haut de la fenêtre.
placé en haut de la fenêtre.
– Cliquer droit sur Analyse / Calcul mécanique. La boîte de dialogue ci-dessous apparaît.

La case "Résumé" ci-dessus donne 2 informations fondamentales :
o le degré d' hyperstatisme. Notion vue en deuxième année. C'est le nombre d'actions mécaniques en trop par rapport aux nombres d'équations qu'il est possible d'obtenir par application du PFS ou du PFD. Impossible dans ce cas de lancer une étude statique ou dynamique à moins de modifier le modèle pour le rendre isostatique ou bien de fixer arbitrairement certaines actions mécaniques.
o le degré de mobilité. C'est le nombre de paramètre de mouvement à piloter. Les autres pièces suivront le mouvement imposé par ce(s) paramètre(s) de mouvement piloté(s).
Par exemple, si le modèle présente deux mobilités, une correspondant à la mobilité utile et l'autre à une mobilité interne, on pourra piloter un mouvement d'entrée et une valeur nulle à la mobilité interne.
– Après avoir lu ce résumé, cliquer sur continuer.
La boîte de dialogue ci-dessous s'ouvre.
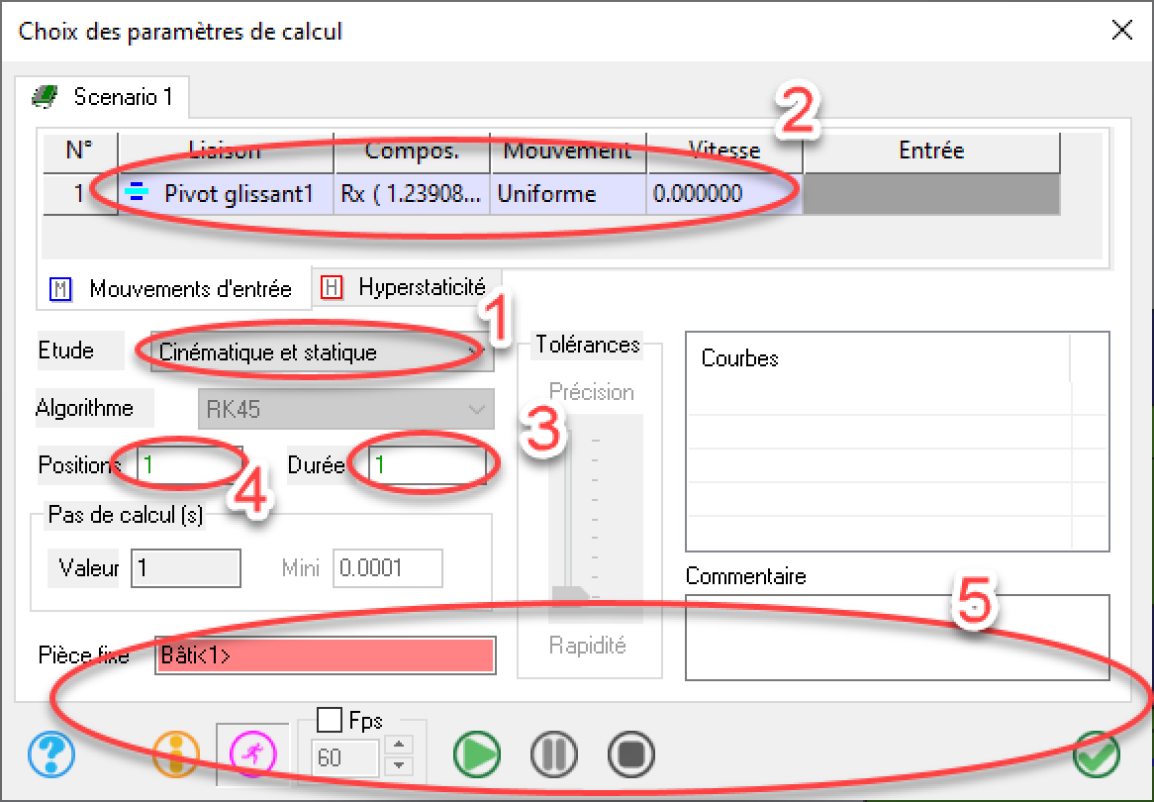
Configurer les paramètres de calcul :
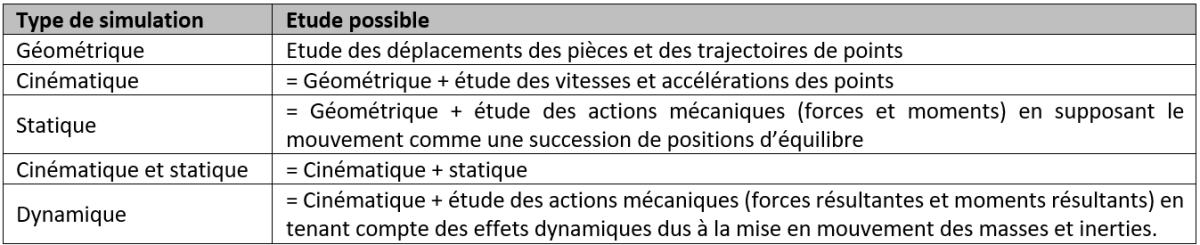
1. Sélectionner le type d'étude à réaliser :
2. Sélectionner et configurer le(s) paramètre(s) de mouvement à piloter
NB : dans une simulation numérique, il est tout à fait possible de piloter le véritable paramètre de sortie et récupérer les valeurs du paramètre d'entrée, ou l'inverse... Exemple du portail : piloter la vitesse d'ouverture du vantail et récupérer la vitesse du moteur. Ainsi :
Choisir la(les) liaison(s) à piloter en double cliquant sur une liaison.
Choisir la composante de la liaison à piloter en double cliquant sur une composante.
Et selon le type d'étude :
o choisir la valeur de la vitesse à piloter (en tr/min si c'est une vitesse angulaire, ou en m/s si c'est une vitesse linéaire) pour des études cinématique et dynamique (voir image ci-contre) ;

o choisir la valeur des positions initiale et finale à piloter (en degré si ce sont des positions angulaires, ou en m si ces sont des positions linéaires) pour des études géométrique et statique (voir image ci-contre).

3. Choisir la durée du mouvement (uniquement pour études cinématique et dynamique)
L'animation du mécanisme se fera en boucle. Il suffit donc de calculer des positions sur 1 seul cycle du(des) paramètre(s) de mouvement piloté(s).
Exemple : sur l'image ci-dessus, la Pivot1 tourne à 60 tr/min, c'est-à-dire 1 tr/s. Ainsi choisir une durée de 1 s correspond à 1 tr complet de la liaison Pivot1. Celle-ci fera donc un tour complet, en boucle...
4. Choisir le nombre de positions à calculer
Exemple : Choisir 100 positions, cela signifie qu'il y aura :
o 100 positions calculées pendant la durée du mouvement, pour des études cinématique et dynamique ;
o 100 positions calculées entre les positions initiale et finale, pour des études géométrique et statique.
5. Lancer le calcul
Vérifier d'abord que la pièce fixe est le bâti.
Afin de visionner l'animation pendant le calcul, sélectionner l'icône ![]() .
.
Cliquer sur CALCUL ![]() avant de cliquer sur SORTIE
avant de cliquer sur SORTIE ![]() .
.