Introduction
Les courbes obtenues après importation des valeurs brutes issues d'un capteur sont souvent difficiles à exploiter en raison des bruits de mesures.
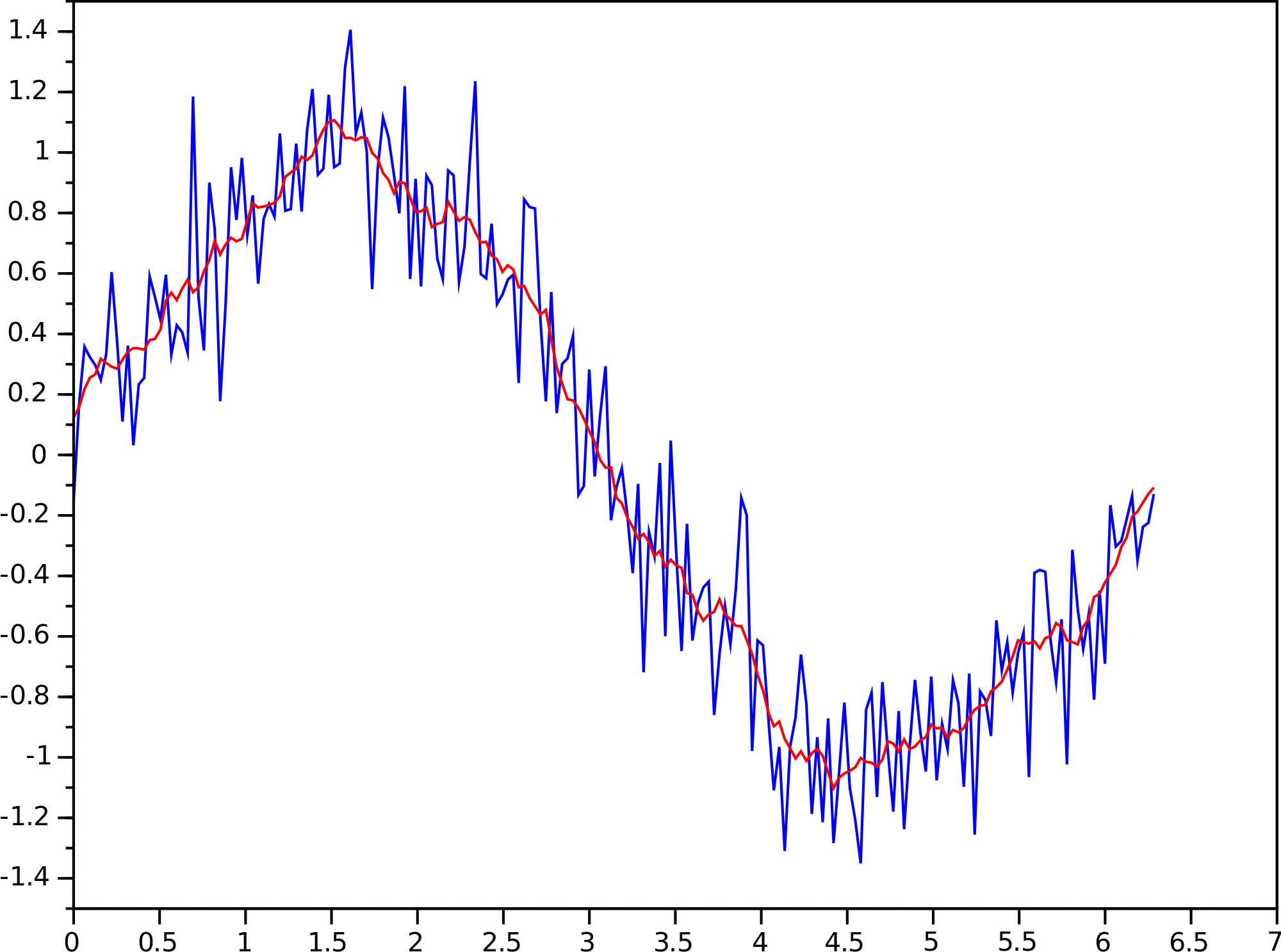
Il est donc intéressant de filtrer ces défauts dont la fréquence des variations est élevée (comparée aux variations du signal que l'on souhaite observer) pour ne conserver que l'évolution de la grandeur qui nous intéresse. Comme on peut le voir sur le graphe ci-contre, on supprime ainsi les fluctuations transitoires de façon à souligner les tendances à plus long terme.
On parle de l'opération de filtrage qui est une étape indispensable du processus de conversion d'un signal analogique en signal numérique (voir le principe de la CAN ici).
Le filtrage peut être utilisé analogiquement ou numériquement (avant ou après la CAN). Dans ce dernier cas, il existe plusieurs méthodes de filtrage. Deux méthodes couramment utilisées, car faciles à mettre en œuvre, sont proposées ci-dessous.
On utilisera la fonction :
B=np.copy(A) # np pour utilisation de la bibliothèque numpy
Cette fonction permet de faire une copie du tableau de valeurs initiales A. Très utile car en Python, modifier une donnée d'une extraction d'un tableau peut entraîner une modification du tableau initial !