Les 2 chaînes de puissance indépendantes
Pour déplacer la sonde ou la caméra, le système dispose de deux chaînes de puissance indépendantes :
la première pour mettre en rotation la tourelle 1 / bâti 0 (afin d'orienter la caméra) ;
la seconde pour translater le bras 2 / tourelle 0 (afin de translater la caméra).

« Sur le système réel, repérer tous les éléments décrits ci-dessus »
.
NB : un transformateur est commun à ces 2 chaînes de puissance.

« Le repérer sur le système réel »
.
On peut remarquer des variateurs (pré-actionneurs) pas très loin de lui. « Les repérer également sur le système réel »
.
Chaîne de puissance de l'activité "mettre en rotation (R) la tourelle 1 / bâti 0" (afin d'orienter la caméra)
Cette chaîne de puissance est constituée principalement de :
le transformateur (alimentation 230V AC en 24V DC) ;
un variateur (pré-actionneur) ;
un moteur à courant continu ;
un réducteur de vitesse constitué de :
– un train épicycloïdal, qui est un train d'engrenages cylindriques particulier ;
– un engrenage cylindrique à contact intérieur,
la tourelle 1 (effecteur).

Chaîne de puissance de l'activité "translater (T) le bras 2 / tourelle 1" (afin de translater la caméra)
Cette chaîne de puissance est constituée principalement de :
le transformateur (alimentation 230V AC en 24V DC) ;
un variateur (pré-actionneur) ;
un moteur à courant continu ;
un réducteur de vitesse à train épicycloïdal ;
un pignon-crémaillère qui transforme le mouvement de rotation de l'axe de sortie du réducteur en mouvement de translation du bras 2 ;
le bras 2 (effecteur).
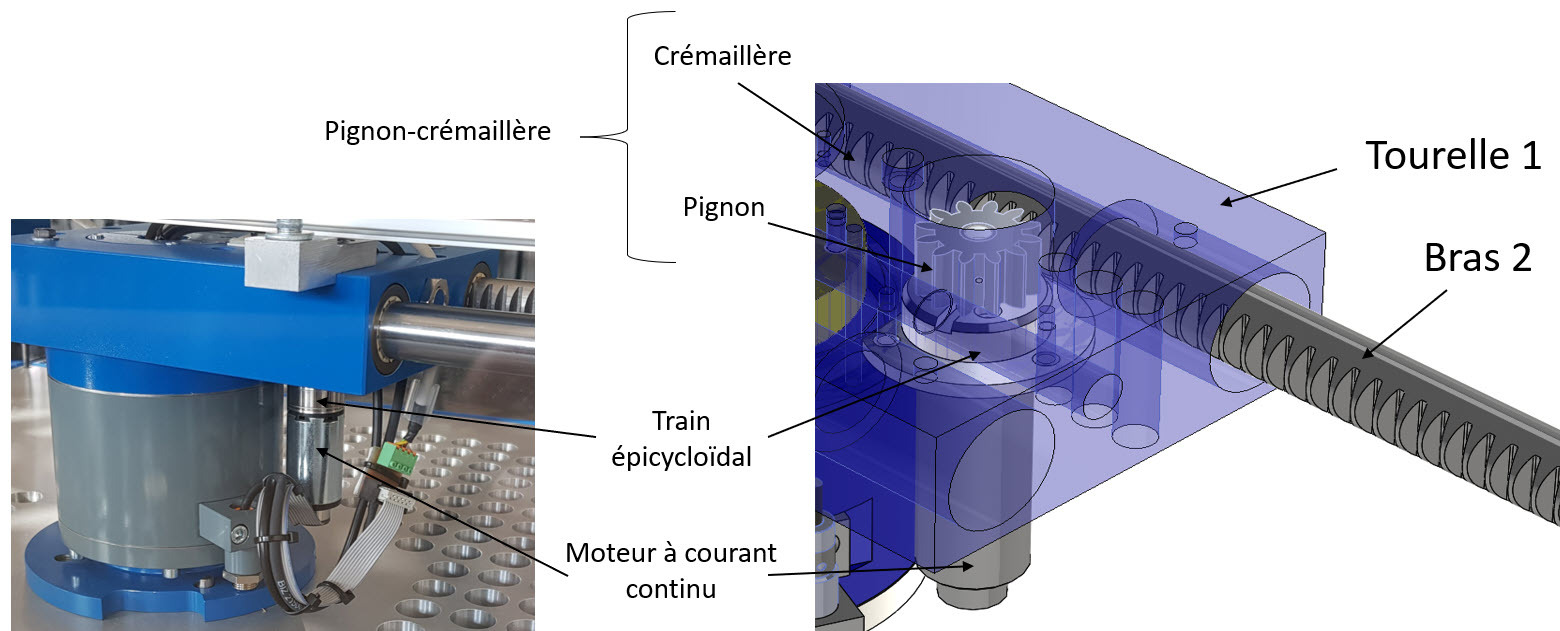
« Sur le système réel, repérer le moteur, le réducteur de vitesse, et la crémaillère »
.