Composants Lego Mindstorms
Fabriquer soi-même ses propres robots, c'est possible avec les robots Mindstorms de Lego. Ce produit est à la fois un jouet et un objet d'expérimentation.

Ces robots se construisent facilement et se programment aisément.
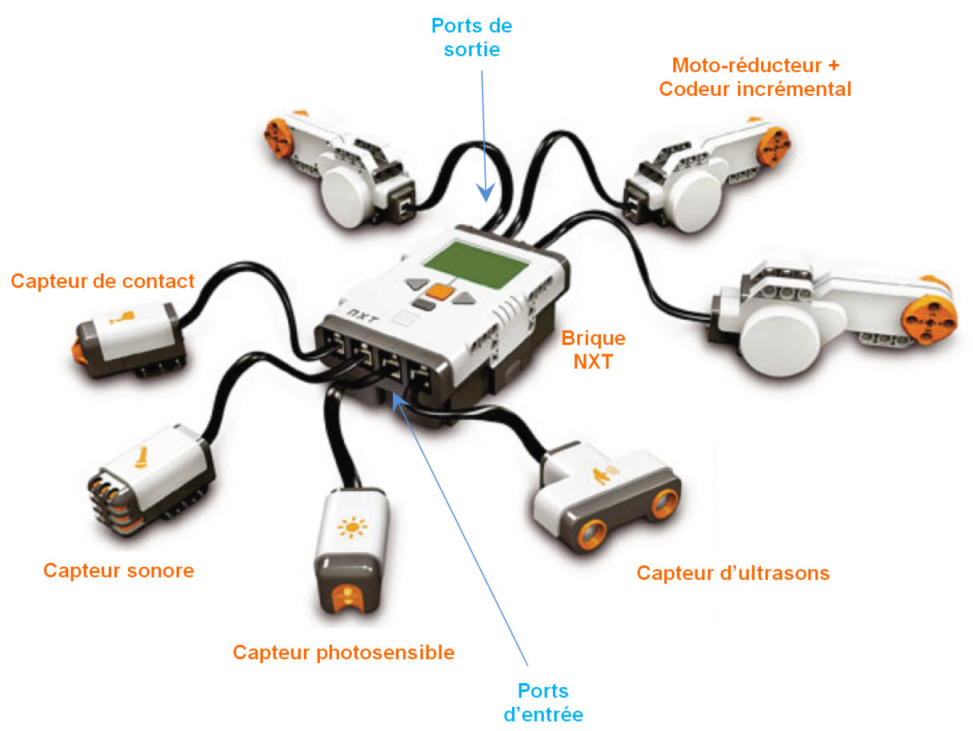
En plus des composants Lego standards, ces robots sont constitués d'unités de commande (brique NXT), d'actionneurs (moteurs, vérins...) et de capteurs (contacts, ultrasons, photosensibles...).
La brique NXT
 | La brique NXT fait office d'unité de commande programmable et de pré-actionneurs. Elle comporte : - un microprocesseur 32 bits ARM7 ; - 1 port USB 2.0 ; - 4 ports d'entrée (1, 2, 3, 4) ; - 3 ports de sortie (A, B, C) Elle supporte la prise en charge de communications sans fil Bluetooth. Elle s'alimente au moyen de 6 piles AA de 1,5 V, ou d'une batterie rechargeable.
|
Les moto-réducteurs et codeurs incrémentaux
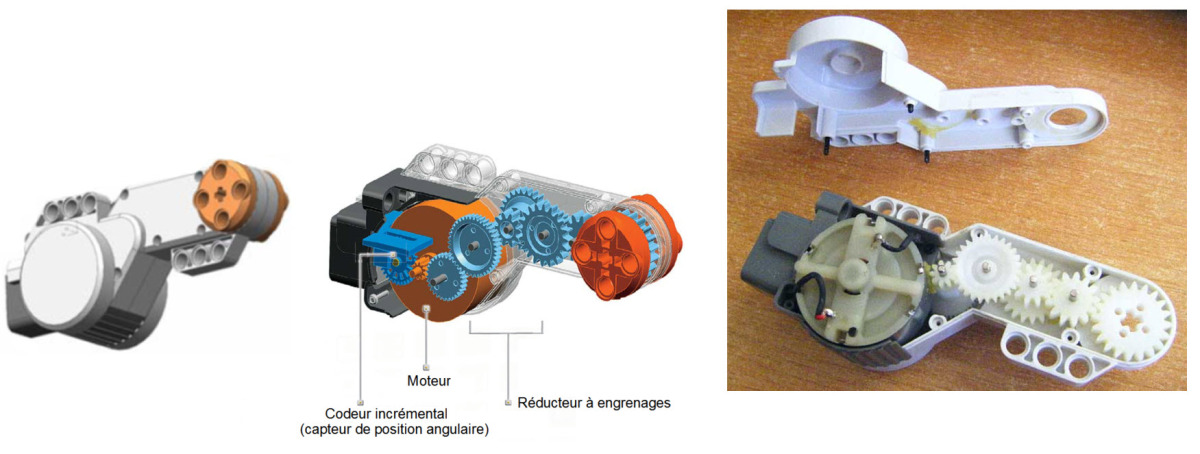
Ces ensembles sont constitués :
- d'un moteur dont la commande est en PWM (Une commande de 100% correspond à une puissance maximale) (pour information une commande de puissance de 75% implique une vitesse de rotation du moteur de 4600 tr/min) ;
- d'un réducteur à engrenages de rapport 1/48 ;
- d'un codeur incrémental (capteur de position angulaire) de précision +/- 1 degré.
« Repérer deux de ces ensembles sur le système réel. »
Le capteur d'ultrasons
 | Le capteur d'ultrasons mesure les distances en centimètres ou en pouces. Il peut mesurer des distances de 5 à 255 cm avec une précision de +/-3 cm.
Test : - mettre sous tension la brique NXT en appuyant sur le bouton orange ; - choisir le sous-menu View sur l'écran du NXT (les flèches servent à naviguer dans les différents menus, le bouton orange à valider, et le bouton gris à annuler) ; - sélectionner le menu Ultrasonic en cm et le port (1, 2, 3 ou 4) où il est connecté ; - constater sur l'écran la distance avec un objet (en approchant par exemple votre main). |
Capteur photosensible (non présent sur ce robot)
 | Le capteur photosensible permet au robot de distinguer la lumière de l'obscurité. Il peut lire l'intensité lumineuse d'une pièce et mesurer l'intensité lumineuse de surfaces colorées. |

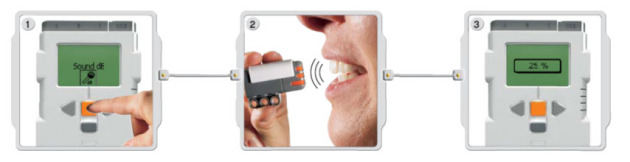
Capteur sonore (non présent sur ce robot)
 | Capteur sonore : Le capteur sonore mesure des sons en décibels (dB). Le capteur peut mesurer les niveaux de pression acoustique jusqu'à 90 dB (bruit d'une tondeuse). Le résultat est en % : - 4-5 % : local silencieux, - 10-30 % : personne parlant normalement, - 30-100 % : personne criant ou musique à fort volume. |
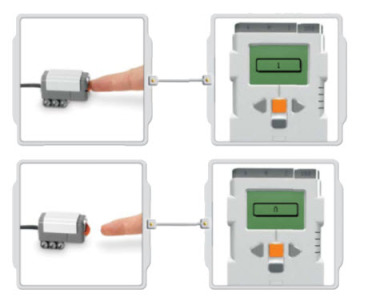
Capteur tactile (non présent sur ce robot)
 | Le capteur tactile détecte si le contact est enfoncé ou relâché. |