Choix de la structure à piloter (BO/BF) et définition des correcteurs et de l'entrée
Choix de la structure SANS TIGE à piloter
Il est possible de mettre en place 3 asservissements imbriqués :
- asservissement en position avec son correcteur de position et son capteur de position (codeur incrémental à effet Hall) ;
- asservissement en vitesse avec son correcteur de vitesse et son capteur de vitesse (codeur incrémental à effet Hall) ;
- asservissement en courant avec son correcteur de courant et son capteur de courant.
Ainsi, en combinant ces asservissements, il est possible de piloter 4 structures en BF et 1 structure en BO sur ce système :
Essai possible | Structure à piloter | Entrée à renseigner |
|---|---|---|
Essai en boucle fermée (BF) | Avec asservissement en position seul | Consigne de position linéaire du chariot |
Avec asservissements en position et en vitesse | ||
Avec asservissements en position et en courant | ||
Avec asservissements en position, en vitesse et en courant | ||
Essai en boucle ouverte (BO) | Sans asservissement (pas de retour capteur envoyé à l'unité de commande) | Tension d'alimentation du moteur |
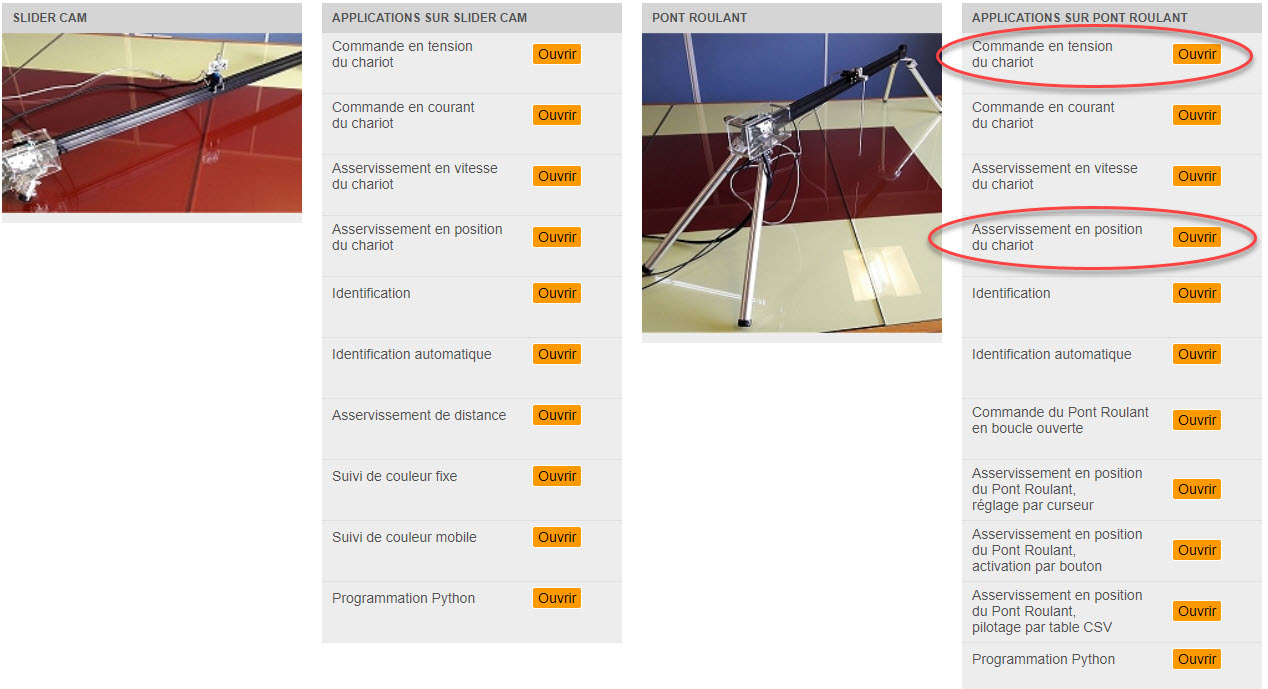
Pour des essais en BO, ouvrir l'application "Commande en tension du chariot" (voir image ci-dessous).
Pour des essais en BF, ouvrir l'application "Asservissement en position du chariot". Ensuite, selon la structure à piloter, désactiver si besoin l'asservissement en vitesse et/ou en courant, en sélectionnant "aucun" dans "Type de correcteur" (voir seconde image ci-dessous).
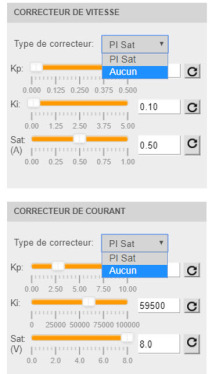
Définition des correcteurs (uniquement pour une structure à piloter en BF)
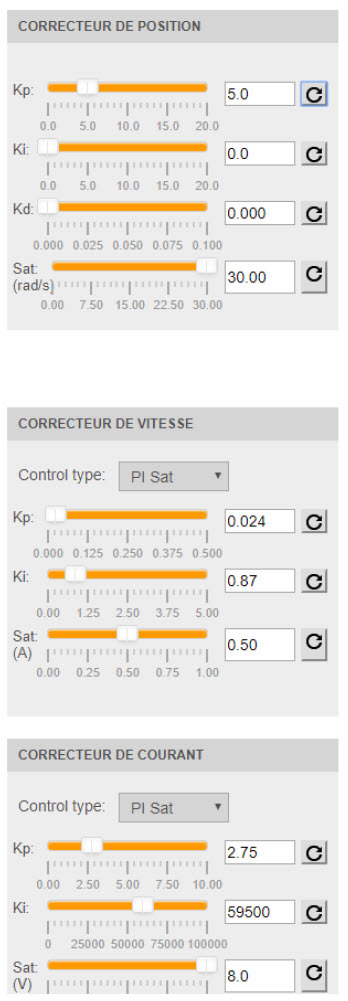
Les zones "correcteurs" permettent également de les définir lorsqu'ils sont utilisés lors de pilotage en BF.
Chaque correcteur (position, vitesse, courant) a pour fonction de transfert \(C(p)=\frac{1}{1,74} \left( K_p+\frac{K_i}{p}+K_d p \right)\) avec :
-\(K_p\) gain proportionnel ;
-\(K_i\) gain intégral ;
-\(K_d\) gain dérivé (NB :\(K_d =0\) pour le correcteur de vitesse et le correcteur de courant).
Le réglage de chaque correcteur (valeurs de\(K_p , K_i , K_d\)) doit être renseigné selon les les valeurs données dans le TP.
NB : il est possible également de régler la saturation (valeur maximum envoyée) en sortie de correcteur. Par défaut, régler à la valeur max.
Définition de l'entrée
Voir tableau en haut de la page afin de connaître la grandeur en entrée de l'essai.
Puis pour définir par exemple en entrée, le signal ci-dessous :
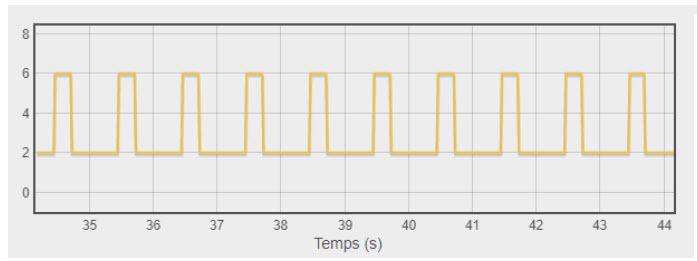
Alors sélectionner :
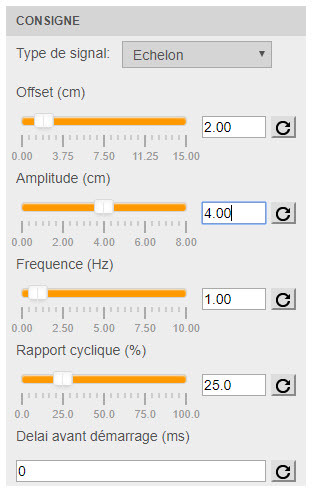
• type de signal : choisir échelon (suite de plusieurs échelons, comme l'image ci-dessus) ;
• offset : le niveau bas du signal est égal à l'offset (qui définit en fait un décalage par rapport à 0). Sur le signal ci-dessus, le niveau bas est 2 ;
• amplitude : le niveau haut du signal est égal à l'amplitude + l'offset ;
• fréquence (Hz) = inverse de la période (s) ;
• rapport cyclique : largeur du niveau haut du signal, définie en pourcentage de la période (régler à 100% pour imposer un seul échelon) (régler à 50% pour imposer une suite d'échelons) ;
• délai avant le démarrage : permet de définir un délai entre le démarrage d'une acquisition et le démarrage du signal ;