Mise en situation
Présentation des robots séries et des robots parallèles
La majorité des manipulateurs ou robots actuels représente des caricatures de bras humain. On utilise donc ce que l'on appelle des robots séries (exemple : le Robot Ericc du laboratoire de SII en photo ci-contre). Ces robots sont constitués de solides dit "bras" en série.
Or, ces robots engendrent des défauts de précision :
- en effet, la disposition en série des bras, fait que chacun d'eux doit supporter, en plus de son propre poids, le poids des bras suivants ainsi que la charge à manipuler. Ceux-ci sont donc soumis à des moments de flexion importants, ce qui impose de les rigidifier, donc de les alourdir. La précision de positionnement souffre de ces déformations de flexion ;
- d'autre part, une petite erreur de mesure sur les capteurs des premiers bras entraîne une erreur importante sur le positionnement de l'effecteur (la pince)...
Ainsi, pour contrer ces défauts, de nouveaux robots ont vu leur apparition : les robots parallèles (en photos ci-dessous).
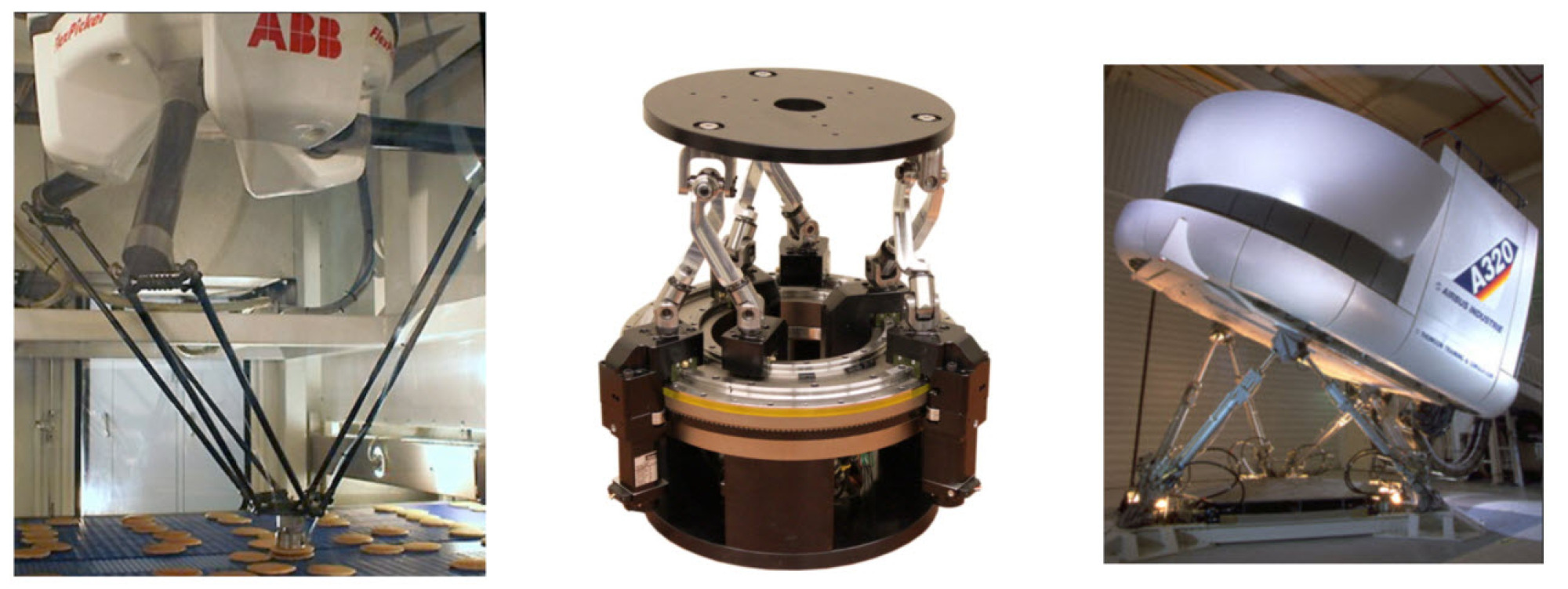
Exemples d'utilisation du robot parallèle FlexPicker dans l'agroalimentaire
Robot du laboratoire
Le robot Delta2D du laboratoire est un robot 2 axes fonctionnant dans le plan vertical.