Robot haptique
contenu
menu
navigation
outils
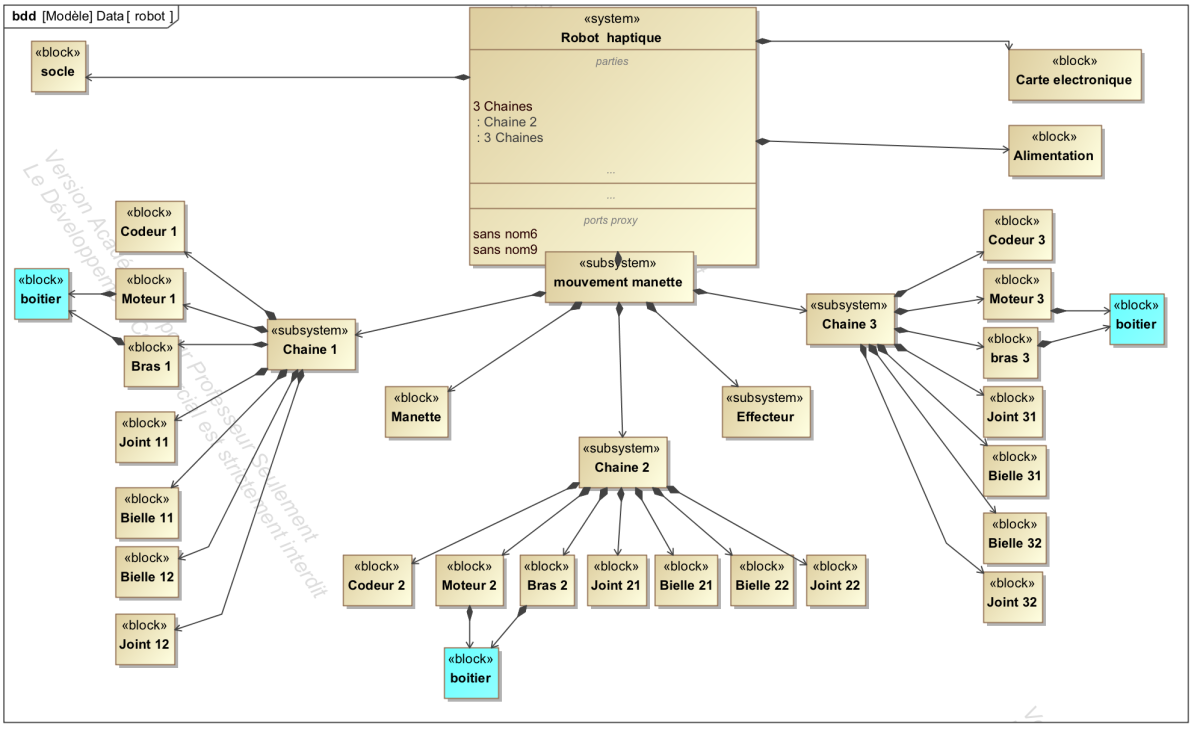
Description structurelle
Diagramme de définition de blocs
Diagramme de blocs internes
Précédent
Suivant
Mise en situation
Mise en œuvre
Énoncé du besoin et des exigences
Fonctionnement et Principaux constituants
Représentation 3D
Description structurelle
Caractéristiques de certains constituants
Acquisition de mesure
Accueil
Module