
Mise en situation
La maquette MAXPID est un sous-ensemble extrait d'un robot de récolte d'oranges (voir photo ci-contre) développé par la société PELLENC S.A. de PERTUIS (Vaucluse). Ce robot est capable de repérer et de localiser automatiquement une orange mûre grâce à un système de vision artificielle. Une fois localisée, l'orange est saisie par une ventouse montée en bout du bras. L'orange ne pourra être saisie et détachée de l'arbre que si la position du bras est parfaitement contrôlée : le bras doit se positionner à l'endroit voulu pour assurer un bon contact de la ventouse et de l'orange, et éviter des mouvements nuisibles (vibrations par exemple). | 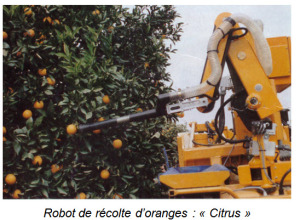 |
La société Pellenc qui développe ce produit, conçoit d'autres systèmes automatisés utilisant ce dispositif :
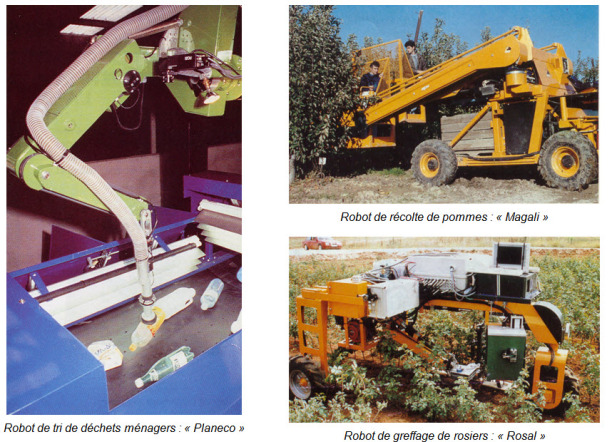
« Visionner la vidéo ci-dessous qui présente ces différents produits. »
Tous ces systèmes présentent plusieurs bras rigides articulés entre eux.
La maquette Maxpid est une articulation entre deux bras rigides que l'on rencontre sur le robot de récolte d'oranges « Citrus » ci-dessus.




