Utilisation du logiciel de pilotage et d'analyse
1/ Mise en position de la maquette : création ou non d'une perturbation
Dans différents essais, il est judicieux de simuler une perturbation, c'est-à-dire une charge sur le bras : « un couple résistant ». Dans la réalité cette perturbation peut être l'action d'une banche sur le bras, le poids des autres bras sur le bras étudié...
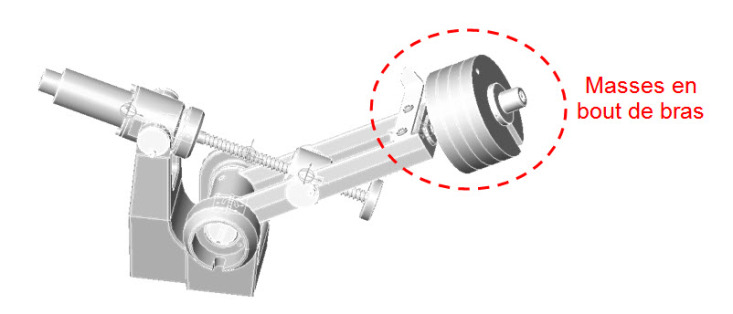
Sur le système, une perturbation sous la forme d'un couple résistant peut être créée grâce aux poids de 2 masses qui sont fixées au bout du bras.
Pour ne pas faire apparaître cette perturbation lors des essais, il suffit alors d'utiliser le système Maxpid en position horizontale, c'est-à-dire couché à plat sur la table. En effet dans cette position, le poids des 2 masses n'intervient plus en s'opposant au mouvement du bras, on a donc cr(t)=0.
«
Suivant le souhait de créer ou pas une perturbation , positionner alors la maquette horizontalement (à plat) ou verticalement (debout) sur la table, puis installer le nombre de masses souhaitées au bout du bras (entre les 2 écrous). »
2/ Mise en marche
« Vérifier que le bouton coup de poing « arrêt d'urgence » n'est pas enclenché (ou enfoncé). »
« Allumer le système à l'aide de l'interrupteur situé sur sa façade gauche. »
« Lancer le logiciel « Maxpid ». »
3/ Paramétrage du correcteur
Dans le menu Travailler avec Maxpid / Schéma organique, vous trouverez la structure de l'asservissement :
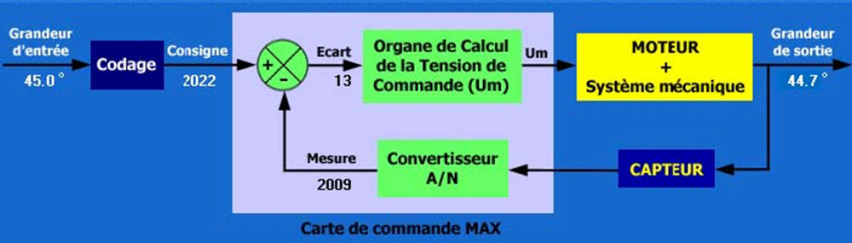
Ce schéma « organique » du logiciel représente les organes du système reliés entre eux, et comporte plusieurs boîtes :
a) L'interface homme/machine (ou codeur).
La fonction de l'interface H/M consiste à permettre la communication entre une personne (l'utilisateur du système) et le système. La consigne en degré est codée en un nombre de points qui lui est proportionnel et acceptable par la carte de commande (car cette dernière fonctionne en mode « numérique »).
NB : L'ordinateur sur lequel vous lisez actuellement peut être assimilé à cette interface H/M. Il ne sert qu'à envoyer les consignes au système MAXPID qui, une fois ces consignes reçues, fonctionne de manière autonome. La carte de commande joue elle, un rôle capital : elle reçoit les consignes de l'ordinateur et pilote le moteur.
b) Le moteur + système mécanique (vis-écrou à billes + bras).
c) Le capteur.
Il fournit à la carte une mesure « analogique » proportionnelle à la grandeur de sortie, c'est à dire une tension électrique.
d) La carte de commande (voir diagramme bloc interne).
Elle est composée de :
un convertisseur Analogique / Numérique. Il convertit la mesure « analogique » fournit par le capteur, en un nombre de points « numérique » qui lui est proportionnel ;
un comparateur. Il compare la consigne et la mesure ;
un organe de calcul de la tension de commande du moteur : correcteur (voir photo ci-dessous).

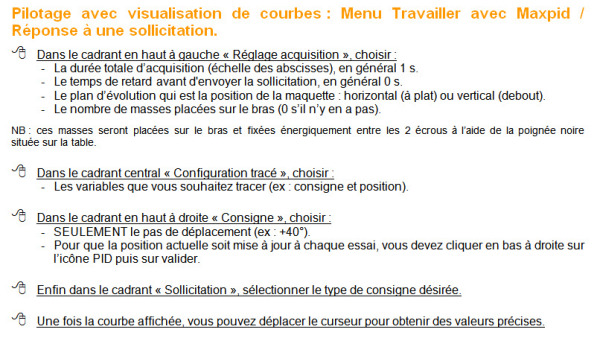
4/ Pliotage avec visualisation de courbes