


Partie Opérative
Axes de rotation
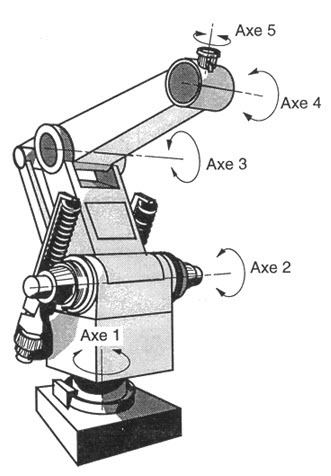
Repérer les 5 axes de rotation sur le robot Ericc 3 :
• Axe 1 : axe de lacet
• Axe 2 : axe d'épaule
• Axe 3 : axe de coude
• Axe 4 : axe de poignet
• Axe 5 : axe de pince
Fonctionnement du premier axe : axe de lacet du robot Ericc
Organisation structurelle des 3 premiers axes
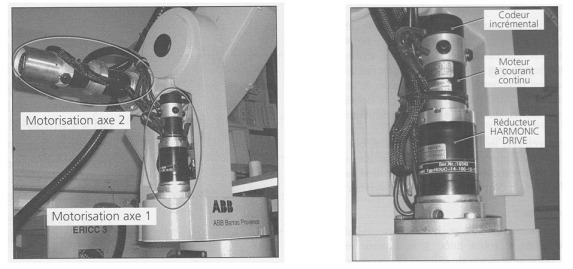
Les trois premiers axes, en partant de la base du robot, sont organisés sur le même principe, qui comprend :
- un moteur à courant continu,
- un premier réducteur à fort rapport de réduction « Harmonic Drive »,
- suivi d'un second réducteur poulie-courroie,
- un codeur incrémental angulaire (ou roue codeuse) qui permet de mesurer la vitesse de rotation et la position angulaire de l'axe,
- et enfin un capteur TOR inductif (associé à une came)
Rappel sur le fonctionnement d'un codeur incrémental (ou roue codeuse)
La roue codeuse est un capteur de position angulaire (et un capteur de vitesse angulaire lorsqu'il est associé à une mesure de temps).
(exemple de la roue codeuse du dialyseur - rein artificiel).
Une lumière émise par une diode électroluminescente (DEL) traverse les fentes de ce disque et crée sur les photodiodes réceptrices un signal analogique. Une carte électronique (qui est inclue dans le codeur) amplifie ce signal puis le convertit en signal carré qui est alors transmis à un système de traitement.
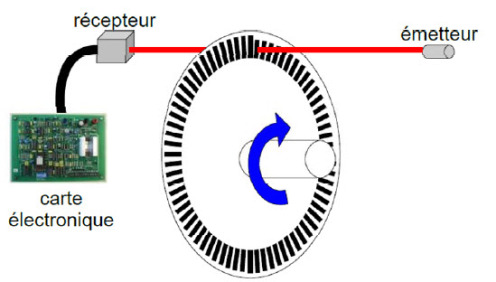
La piste extérieure est divisée en « n » intervalles d'angles égaux alternativement opaques et transparents, « n » s'appelant la résolution ou nombre de périodes ; c'est en effet le nombre d'impulsions qui seront délivrées par le codeur pour un tour complet de son disque.
Inconvénient d'un codeur incrémental (ou roue codeuse)
Le codeur incrémental (ou roue codeuse) est un capteur relatif . La mesure qu'il renvoie, donne une valeur par rapport à la position précédente, et non pas par rapport à un repère absolu. Il faut donc lui associer un capteur TOR inductif qui est un capteur absolu et qui définit le 0 absolu.
Le capteur inductif est associé à une came pour le robot Ericc.

Repérage des différents éléments
Le préactionneur des 5 moteurs se situe sous la table (boîtier de grande taille avec bouton arrêt d'urgence). C'est un variateur électronique.
Repérer les actionneurs et les transmetteurs de ces 5 axes, ainsi que l'actionneur pour fermer la pince.
Repérer les codeurs incrémentaux de ces 5 axes, puis les capteurs TOR inductifs des 5ème, 4ème, 3ème et 2ème axes.
Appeler le professeur pour qu'il vienne valider.




