Étape 2 : créer les liaisons entre les solides
– ajouter une liaison. Pour cela :
cliquer droit sur Liaisons, et sélectionner ajouter, puis sélectionner la liaison souhaitée ;
sélectionner les 2 pièces en liaison en cliquant en premier sur la pièce de référence, puis sur la pièce en mouvement afin d'avoir un paramètre géométrique orienté de la même manière que sur le schéma cinématique utilisé pour une éventuelle simulation manuelle (exemples : pour un paramètre géométrique angulaire \(\beta\) défini comme \(\beta=(\vec x_\textbf{3},\vec x_\textbf{6})\) cliquer sur 3 puis sur 6, ou alors pour un paramètre géométrique linéaire \(\lambda\) défini comme \(\overrightarrow{H_\textbf{2}D_\textbf{3}} =\lambda \vec x_2\) cliquer sur 2 puis sur 3) ;
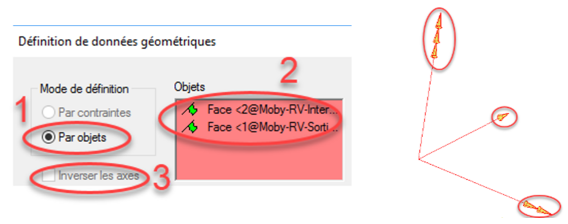
définir les données géométriques selon l'image ci-dessous :
choisir le mode de définition « par objet » (voir image ci-dessous 1) ;
sélectionner le ou les objets qui définissent la caractéristique géométrique de la liaison (voir tableau ci-dessous qui précise le type d'objet à sélectionner pour les différentes liaisons).
Lorsque le ou les objets sélectionnés sont corrects, un ou des drapeaux verts sont affichés devant eux (voir image ci-dessous 2) ; :
avant de terminer la création de la liaison, vérifier dans la zone graphique, l'orientation du repère de liaison, qui vient d'être créé. Ce repère apparaît avec une simple flèche pour l'axe 1, une double flèche pour l'axe 2, une triple flèche pour l'axe 3 (voir photo du repère ci-dessous).
Pour les liaisons à axe (pivot, pivot glissant, hélicoïdale), l'axe de la liaison est toujours l'axe 1.
Pour la liaison glissière, la direction de la liaison est toujours suivant l'axe 1.
Si besoin, sélectionner « Inverser les axes » pour que cet axe 1 soit orienté dans le même sens que celui sur le schéma cinématique utilisé pour une éventuelle simulation manuelle.
Liaison à créer | Objets à sélectionner |
|---|---|
Pivot ou pivot glissant | une surface cylindrique OU une arrête circulaire dont l’axe définit l’axe de la liaison. |
Glissière | une arête linéaire dont la direction définit la direction de la liaison. |
Sphérique (nommée rotule dans Meca3D) |
NB : si on définit uniquement le centre (ce qui est normalement suffisant pour une liaison sphérique), Meca3D va positionner la base du repère de la liaison aléatoirement. Or parfois, il est judicieux de choisir la direction de l’axe 1 (axe x) de cette base. Ainsi :
NB : lors de la phase de simulation qui sera faite plus tard, la définition de cet axe x pourra être nécessaire afin de bloquer un degré de « mobilité interne ». Pour cela, il suffira de commander une position nulle ou une vitesse nulle à la rotation autour de cet axe (Rx dans notre cas), en veillant à sélectionner un « mouvement libre ». |
Cylindre-plan (nommée linéaire rectiligne dans Meca3D) | en maintenant la touche CTRL enfoncée : une surface cylindrique ET un plan |
Engrenage cylindrique ou poulies-courroie ou pignon-crémaillère | en maintenant la touche CTRL enfoncée :
Attention, l’ordre de sélection des 2 pièces (étape précédente) et non pas l’ordre de sélection des 2 surfaces, désigne la pièce qui sera la 1 et la pièce qui sera la 2. Cette information est nécessaire ensuite pour préciser les diamètres ou nombres de dent, ou de filets des deux pièces (pièces 1 et 2). |
Généralisée (personnalisée)
| en maintenant la touche CTRL enfoncée :
Le repère associé à la liaison apparaît sur la zone graphique. La simple flèche correspond à l’axe x, la double flèche à l’axe y et la triple flèche à l’axe z. Sélectionner les degrés de liberté autorisés par cette liaison. Par défaut, les sélectionner tous.
|
cliquer alors sur « Terminer ».
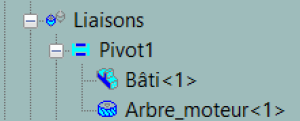
– vérifier les liaisons créées. Pour cela :
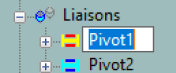
faire apparaître les pièces en liaison dans l'onglet Meca3D, en cliquant sur le symbole + devant une liaison (voir image ci-contre).
Si les pièces constituants la liaison ne sont pas les bonnes, cliquer droit sur cette liaison et sélectionner modifier.
La première pièce d'une liaison est la pièce de référence. Si une liaison n'est pas correctement configurée (2/3 au lieu de 3/2), cliquer droit sur cette liaison et choisir option/inverser les pièces ;
mettre en surbrillance les pièces et le repère de la liaison dans la zone graphique, en cliquant sur une liaison dans l'onglet Meca3D.
Si l'axe 1 d'une liaison n'est pas dans le bon sens, cliquer droit sur cette liaison et choisir option/inverser les axes ;
cliquer sur l'icône « reconstruire »
 placé en haut de la fenêtre ;
placé en haut de la fenêtre ;
– renommer explicitement une liaison, en double cliquant sur son nom :
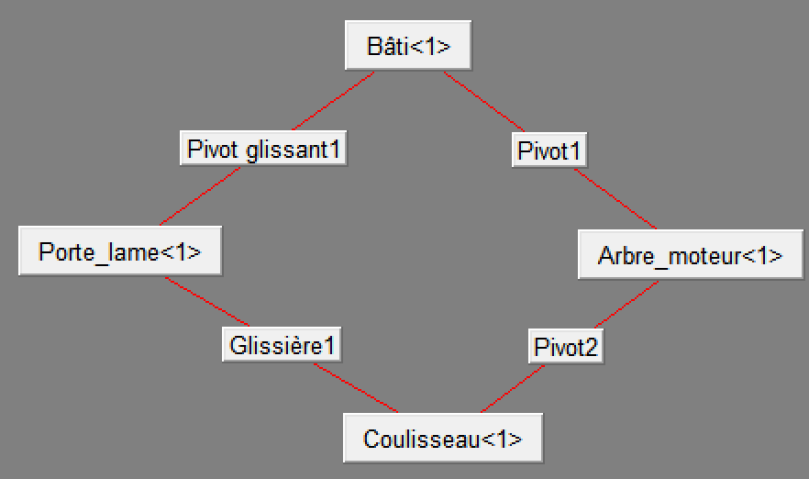
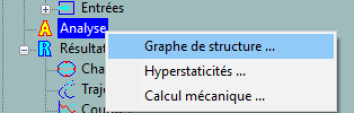
Graphe de structure
– Cliquer droit sur Analyse / Graphe de structure afin de vérifier toutes les liaisons entre les différentes solides
NB : il est possible de déplacer les pièces dans le graphe de structure, en cliquant dessus...