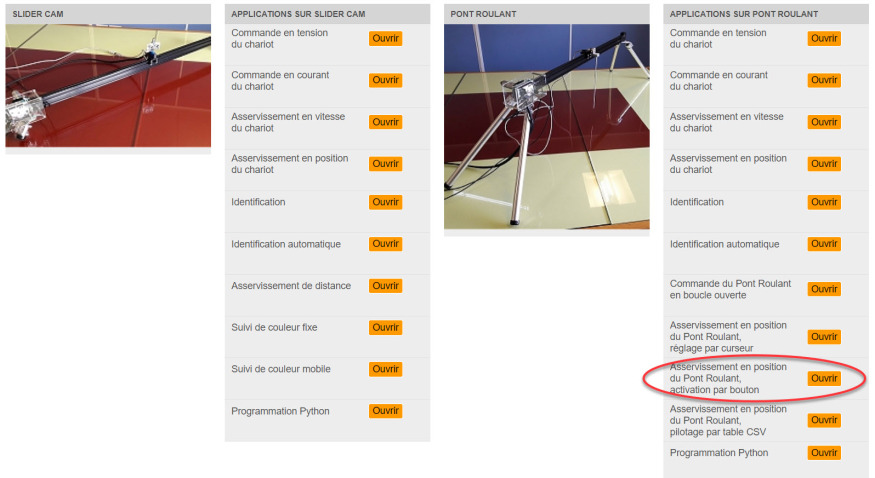
Pilotage
Ouvrir l'application "Asservissement en position du Pont Roulant, activation par bouton".
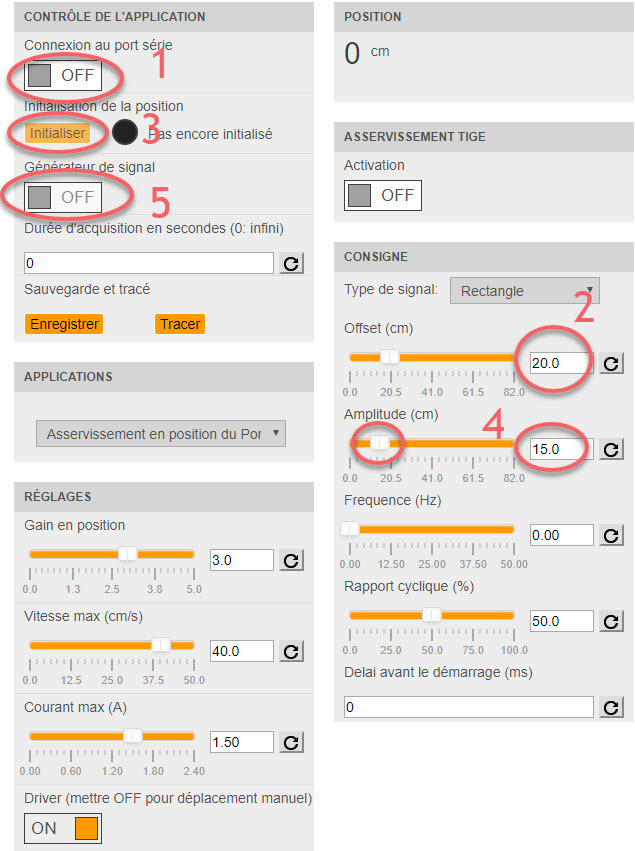
Puis (voir image ci-contre) :
1/ Sélectionner "On" sur le bouton "Connexion au port série". Le chariot doit alors se positionner en butée gauche.
2/ Régler l'offset (décalage par rapport à l'origine) sur 20cm ;
3/ Cliquer sur "Initialiser". Le chariot doit alors se positionner à 20cm de la butée gauche. Ce sera sa position initiale.
4/ Saisir la consigne de déplacement du chariot souhaitée (par exemple 15cm).
5/ Lancer la consigne en sélectionnant "On" sur le bouton "générateur de signal".
NB : les graphiques permettent de visualiser l'évolution des différents paramètres mesurés : position et vitesse du chariot, tension et intensité moteur.
6/ Réaliser un essai dynamique, c'est à dire en faisant varier de gauche à droite le curseur de l'amplitude et observer le balancement de la tige.
7/ Enfin, arrêter d'envoyer une consigne d'amplitude, en sélectionnant "Off" sur le bouton "générateur de signal".
Asservissement de la position angulaire de la tige
On va asservir la position angulaire de la tige afin que la tige reste verticale pendant le mouvement du chariot.
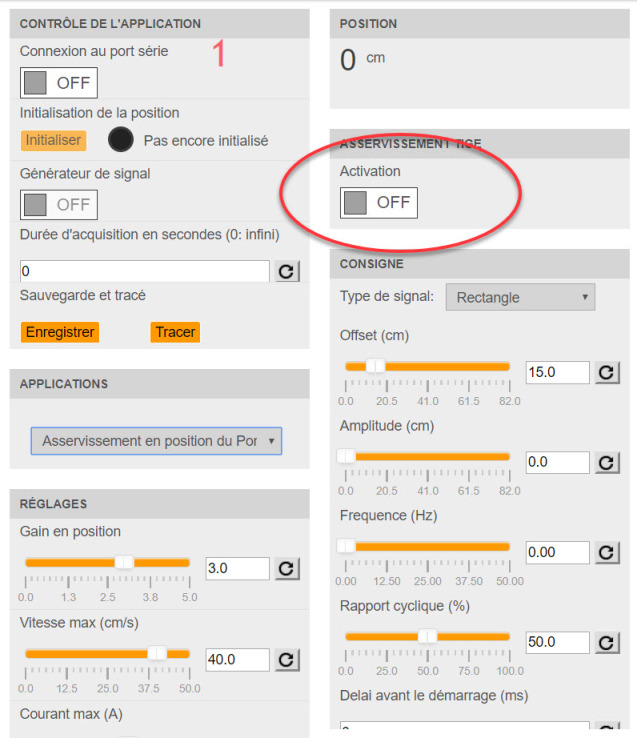
Sélectionner "On" sur le bouton "Asservissement de la tige".
Refaire un essai dynamique (sélectionner "On" sur le générateur de signal, puis faire varier de gauche à droite le curseur de l'amplitude) et observer le non-balancement de la tige.