Les 26 chaînes de puissance indépendantes
Pour se déplacer et échanger avec son environnement, le robot NAO dispose de 26 chaînes de puissance indépendantes :
2 chaînes de puissance quasi-identiques, une pour chaque mécanisme de préhension au niveau des doigts ;
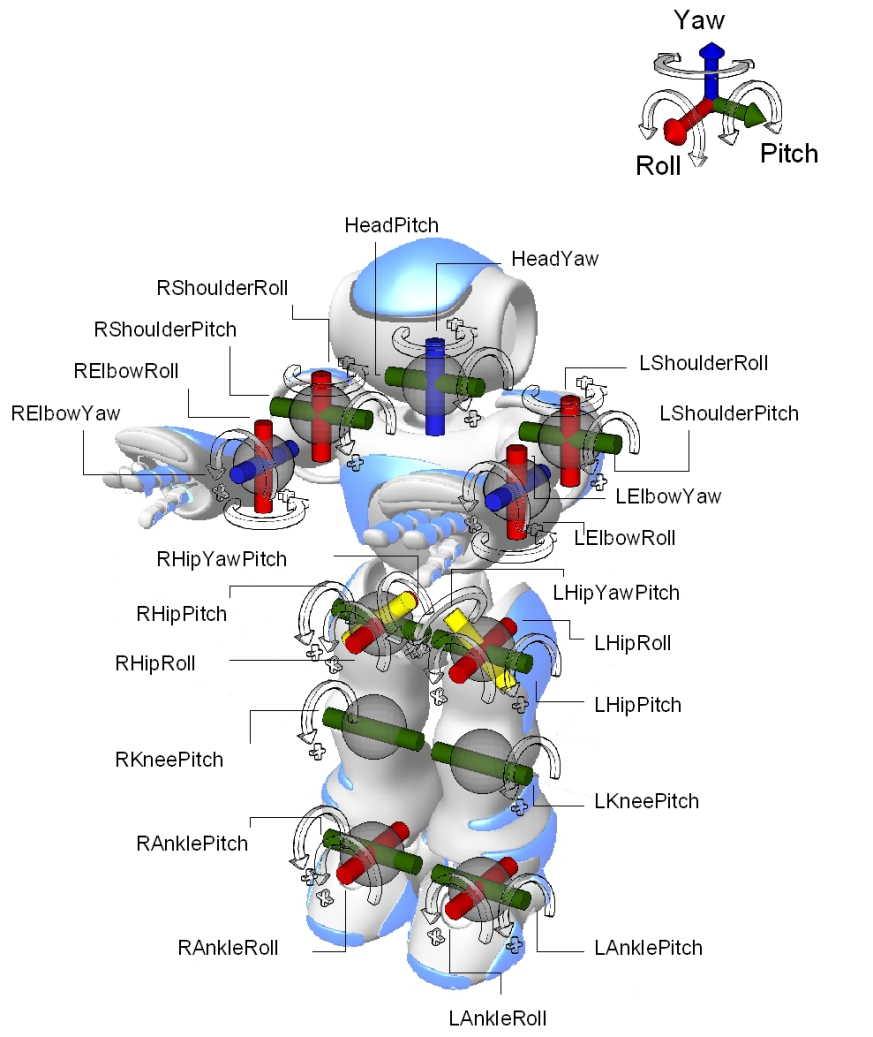
24 chaînes de puissance quasi-identiques, une pour chaque articulation (ou axe) : voir image ci-dessous de 22 de ces 24 articulations (en effet, il manque la rotation de chaque poignet (en anglais wrist).
NB1 : La lettre L devant chaque mot signifie Left (gauche), et la lettre R signifie Right (droit).
NB2 : Ankle (cheville), knee (genou), hip (hanche), elbow (coude), shoulder (épaule), head (tête).
NB3 : Pitch (tangage), roll (roulis), yaw (lacet)
NB : un transformateur (alimentation convertissant les 230V AC en ?V DC) et une batterie (située au dos de NAO) sont communs à toutes ces chaînes de puissance.
« Les repérer »
.
Principe d'une chaîne de puissance pour un axe
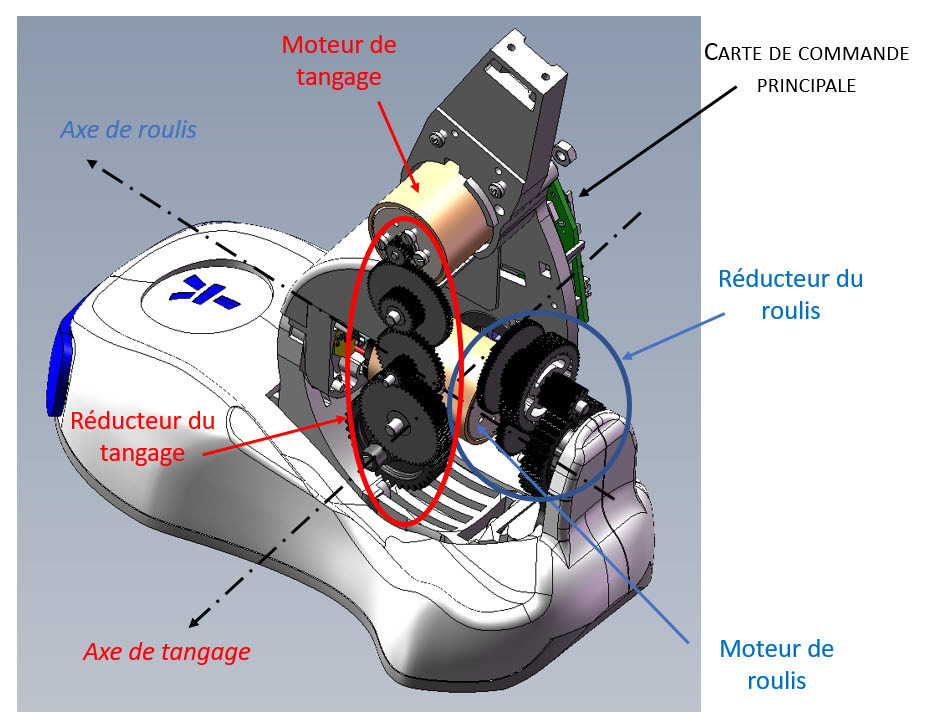
La chaîne de puissance pour mettre en rotation un axe est constituée principalement de :
le transformateur ;
une batterie ;
un hacheur ;
un moteur à courant continu ;
un réducteur de vitesse à engrenages cylindriques.
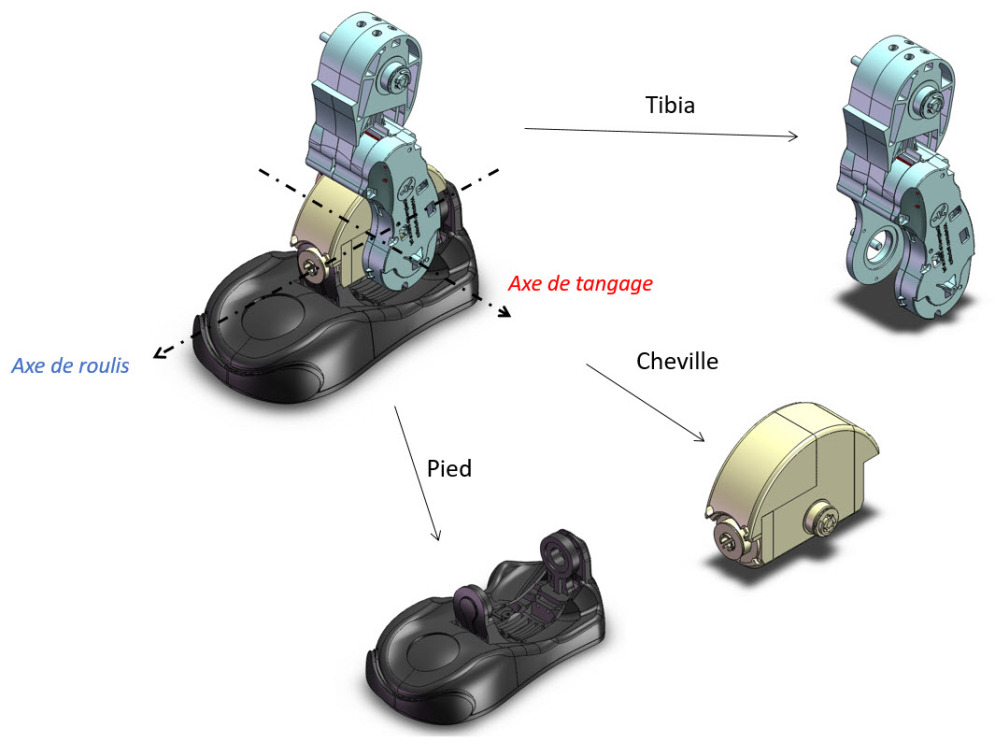
Exemple : les 2 axes associés à la cheville
La "cheville" se caractérise par 2 chaînes de puissance indépendantes, utiles pour le positionnement du tibia / pied (voir image ci-dessus).
une première pour orienter le tibia / cheville : axe de tangage (selon l'image ci-dessous) ou AnklePitch (en anglais, selon l'image ci-dessus) ;
une seconde pour orienter la cheville / pied : axe de roulis (selon l'image ci-dessous) ou AnkleRoll (en anglais, selon l'image ci-dessus).
« Repérer les éléments ci-dessus sur NAO, ainsi que sur la cheville qui est démontée sur la table »
.
NB : Le laboratoire possède également une autre cheville, mais cette fois-ci didactisée pour des expériences :
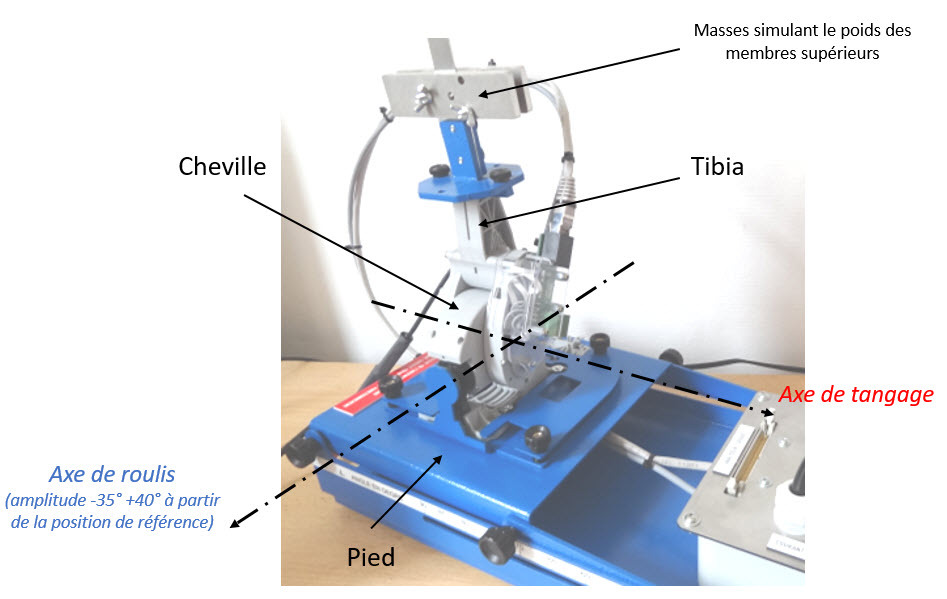
« Repérer les éléments ci-dessus sur la cheville didactisée »
.