La chaîne d'information
Les 3 chaînes de puissance sont commandées par 1 chaîne d'information, constituée principalement de :
une manette ;
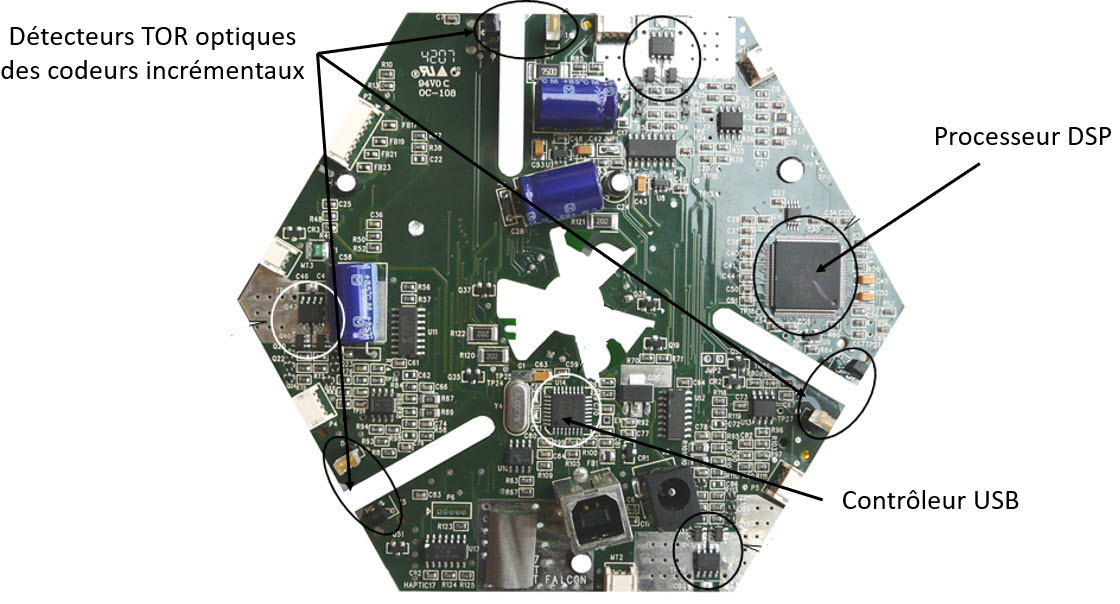
3 codeurs incrémentaux optiques ;
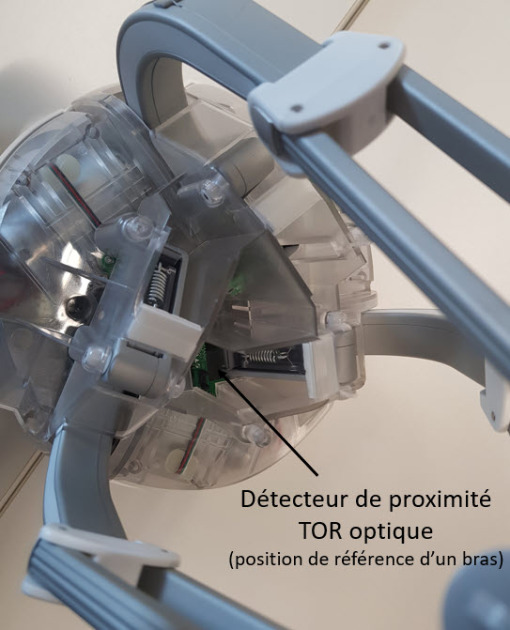
3 détecteurs de proximité TOR optiques ;
un processeur DSP ;
un contrôleur USB pour communiquer avec le logiciel de pilotage.
NB1 : les 3 détecteurs de proximité TOR optiques détectent la position de référence de chaque bras. Ne pas confondre ces 3 détecteurs (1ère image ci-dessous) avec ceux utilisés dans les codeurs incrémentaux (voir 2ème et 3ème images ci-dessous).
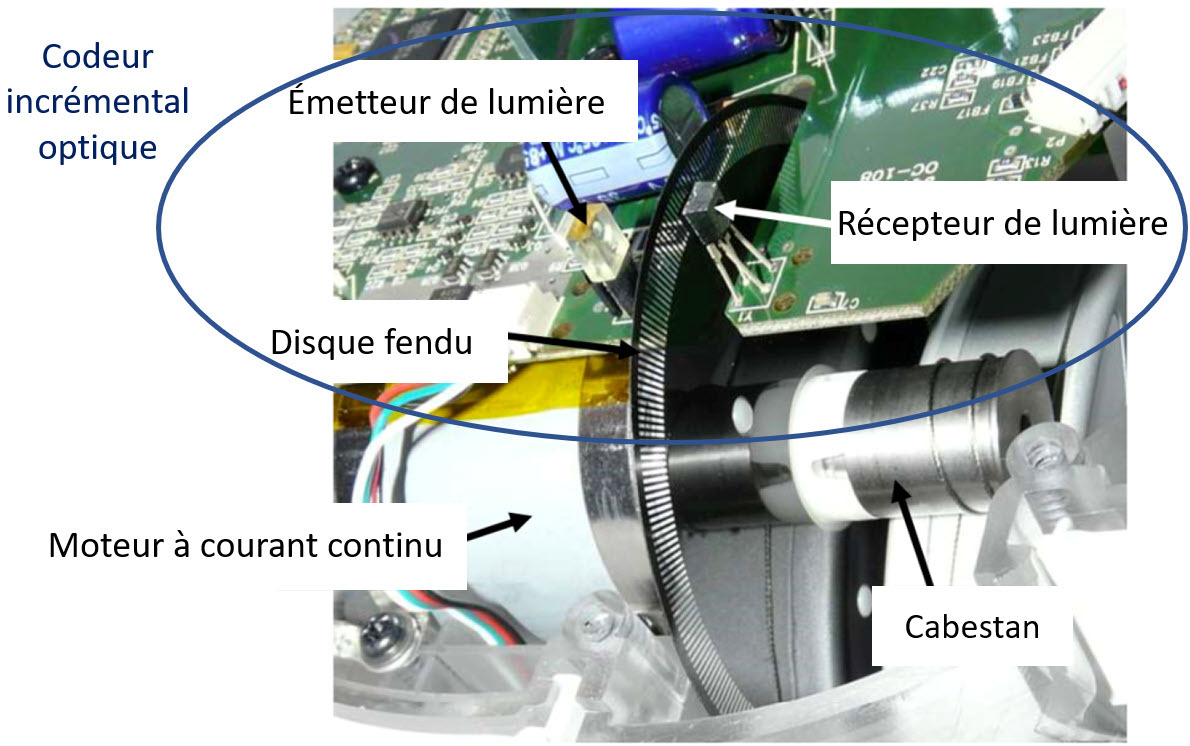
NB2 : les 3 codeurs incrémentaux optiques (un pour chaque axe) permettent de mesurer les position et vitesse angulaires des rotors des moteurs.
Rappel : un codeur incrémental optique est constitué d'un disque fendu et d'un détecteur de proximité TOR optique (émetteur + récepteur).
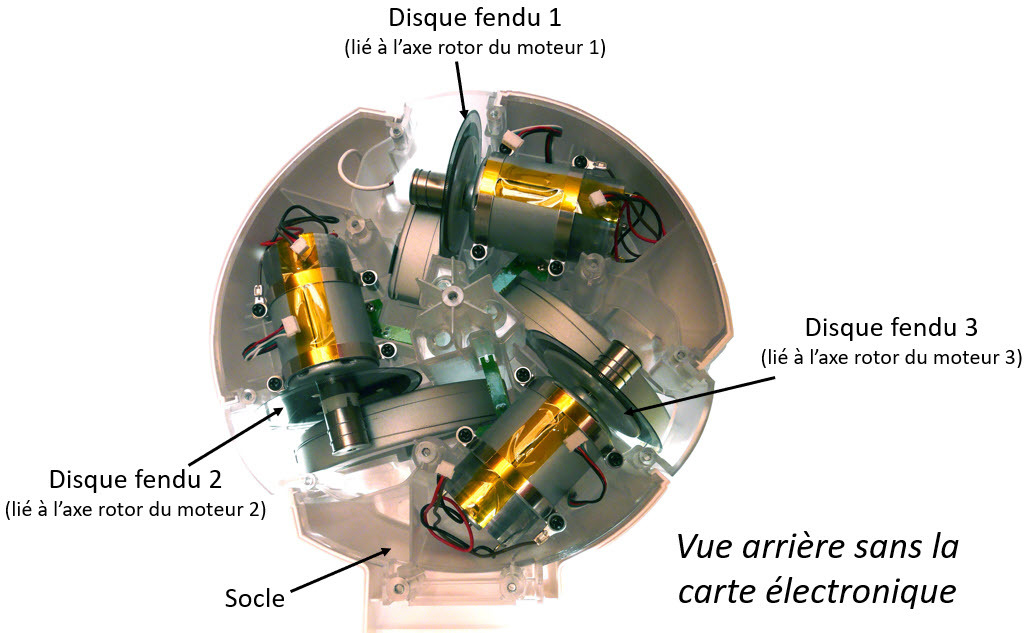
« Repérer TOUS les éléments ci-dessus, sur le robot haptique réel, dont le carter avant a été enlevé. »