


Implantation sur le robot de récolte d'oranges : « Citrus »
Les bras rigides articulés entre eux, du robot comprennent :
• un axe R2 (débattement +35°, -45°),
• un axe R3 (débattement +30°, -30°),
• un axe R4 (allongement 0mm, +1360mm).
NB : L'axe R1 correspond à la translation du bras (non représentée).
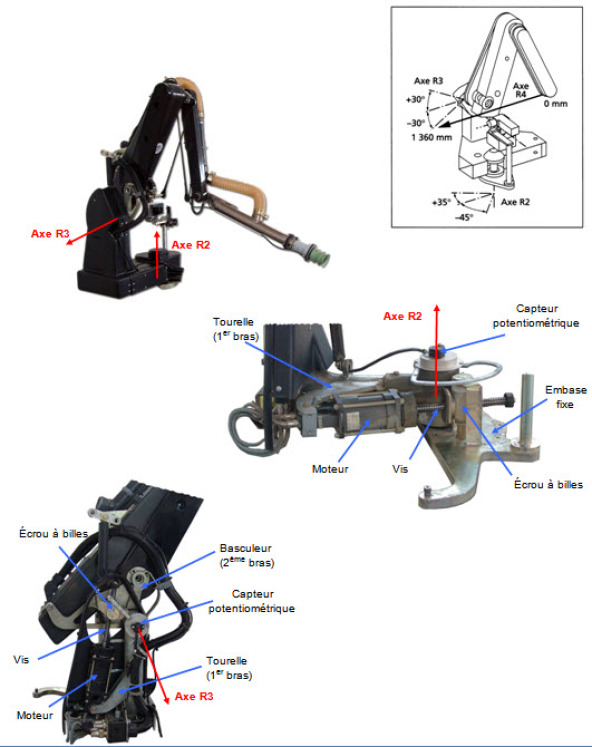
Faire le parallèle avec la maquette du laboratoire, et comprendre le fonctionnement des axes R2 et R3 ci-dessus.




