
Constituants visibles sur la maquette du laboratoire
Vue générale
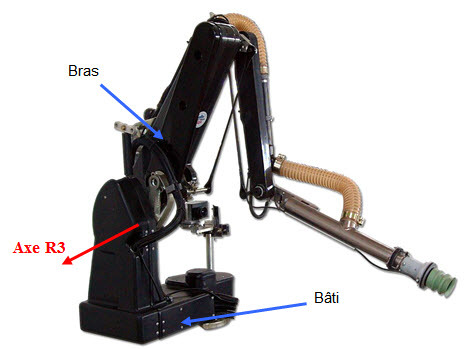 | La maquette Maxpid est l'articulation entre le bâti et le premier bras du robot de récolte d'oranges « Citrus », ci-contre. |
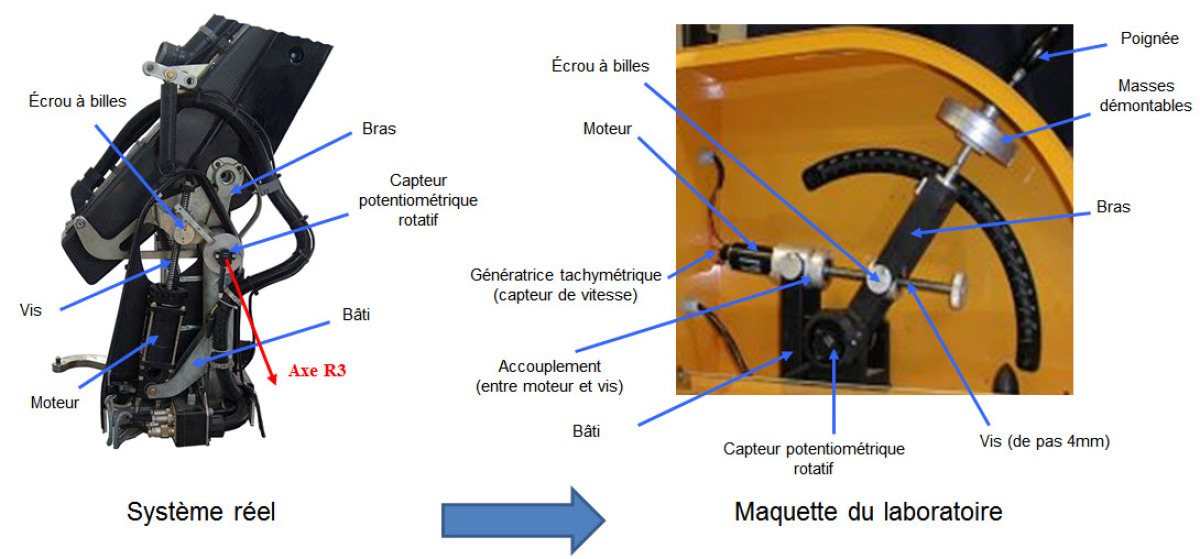
Cette maquette est principalement constituée d'un bras, en mouvement de rotation par rapport au bâti.
Un moteur à courant continu (alimenté en 24V) entraîne en rotation une vis (liée à l'axe moteur par un accouplement), dont l'écrou transforme le mouvement de rotation en mouvement de translation.
Ce mouvement de translation est ensuite traduit en mouvement de rotation grâce à une liaison pivot entre le bras et le bâti.
La commande du moteur est une commande asservie en position par l'intermédiaire d'un capteur potentiométrique rotatif, situé au niveau de cette liaison. Il informe l'unité centrale de la position angulaire du bras.
«
Repérer tous les éléments ci-dessus sur la maquette. »
«
Visionner la vidéo du Maxpid en mouvement ci-dessous. »
Un logiciel d'application installé sur un ordinateur permet à la fois en « temps réel » :
- d'entrer les consignes de position du bras Maxpid ;
- de visualiser les différentes mesures de position, de vitesse et de couple moteur (effort tournant).
Moteur à courant continu
 |
|
Accouplement "joint d'Oldham"
L'accouplement "joint d'Oldham" permet de réaliser la fonction « transmettre un mouvement de rotation entre deux arbres parallèles non coaxiaux ». Dans le Maxpid, il permet d'accoupler l'axe du moteur avec l'axe de la vis.
« Visionner la vidéo ci-dessous présentant le fonctionnement de ce type d'accouplement. »
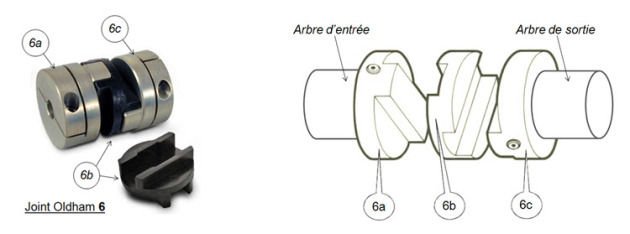
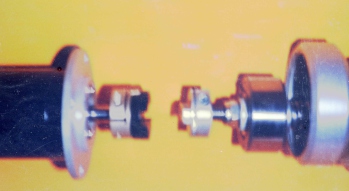
« Repérer le joint d'Oldham sur la photo du système réel ci-dessous. »
« Repérer le joint d'Oldham sur la vidéo du Maxpid en mouvement, en haut de cette page. »
Vis-écrou à billes
Le dispositif vis-écrou permet de réaliser la fonction « transformer un mouvement de rotation en un mouvement de translation » ou réciproquement.
Selon le blocage en rotation ou translation de la vis ou de l'écrou, il existe 4 possibilités de réaliser cette transformation de mouvement avec ce dispositif :
- Rotation vis + translation vis ;
- Rotation vis + translation écrou ;
- Rotation écrou + translation écrou ;
- Rotation écrou + translation vis.
Afin de diminuer les frottements entre ces 2 composants, des billes sont parfois insérées. C'est le cas ici.
« Visionner la vidéo « Circulation des billes dans un système vis-écrou à billes » ci-dessous. »
Représentation 3D

Fichier .exe disponible uniquement pour ordinateur
Fichier .easm pour tablette (ouvrir avec l'application eDrawings)




