
Architecture d'un axe
Un 8ème axe est disponible. Il est démonté et situé dans la mallette à coté de la maquette.

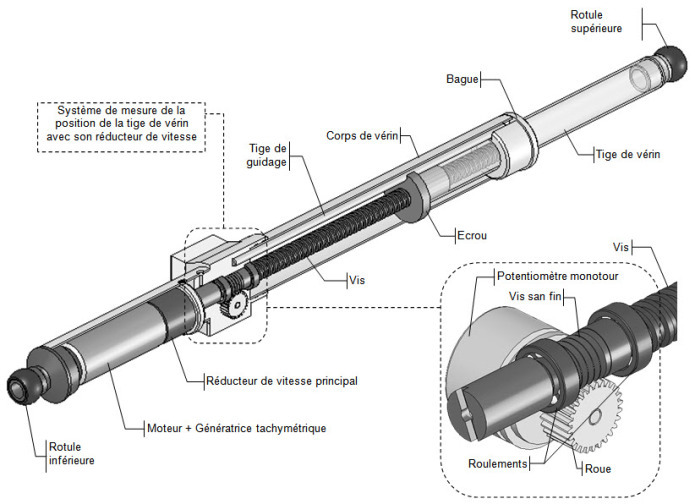
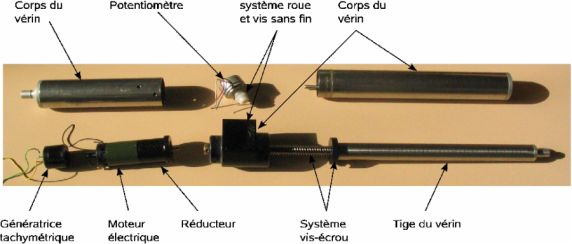
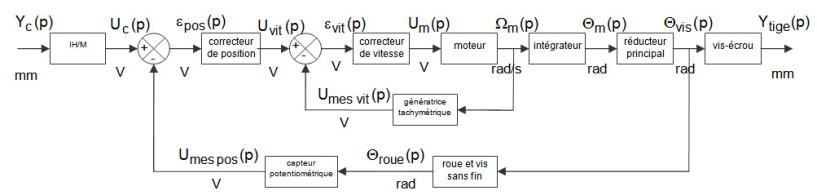
Le vérin de type électrique est constitué :
• d'un moteur à courant continu (actionneur) (de 4 W environ et tournant à 6000 tr/min en régime nominal), permettant de transformer l'énergie électrique en énergie mécanique de rotation ;
• d'une génératrice tachymétrique (capteur), mesurant la vitesse angulaire du moteur et délivrant une tension image proportionnelle à cette vitesse angulaire. Elle délivre 0,84 V/(tr/min) ;
• d'un réducteur de vitesse principal épicycloïdal (transmetteur) de rapport 19,4 permettant de réduire la vitesse angulaire du moteur ;
• d'un réducteur de vitesse secondaire roue-vis sans fin (transmetteur) de rapport 25, permettant d'adapter le nombre de tours de la vis à la mesure effectuée par le potentiomètre monotour ;
• d'un potentiomètre monotour (capteur) permettant de connaître, à chaque instant t, la position de la tige du vérin, et délivrant une tension image proportionnelle à cette position ;
• d'un dispositif vis-écrou (de pas p = 6,35 mm) (transmetteur), permettant de transformer le mouvement de rotation de la vis liée au rotor du moteur en un mouvement de translation de l'écrou lié à la tige du vérin (NB : 1 tour de la vis fait avancer de 1 pas l'écrou) ;
• d'une tige (effecteur).
Remarques :
- La vis sans fin et la vis sont en liaison encastrement et donc tournent à la même vitesse angulaire par rapport au corps de vérin.
- La tige de guidage a pour unique fonction d'empêcher la rotation de l'écrou par rapport au corps de vérin.
- La course maximale du vérin, qui correspond à la distance qui sépare un point de la tige entre ses deux positions extrêmes (tige totalement rentrée/tige totalement sortie) est de 150 mm.





