
Axes de lacet, d'épaule et de coude
Diagramme de blocs internes de l'axe de lacet
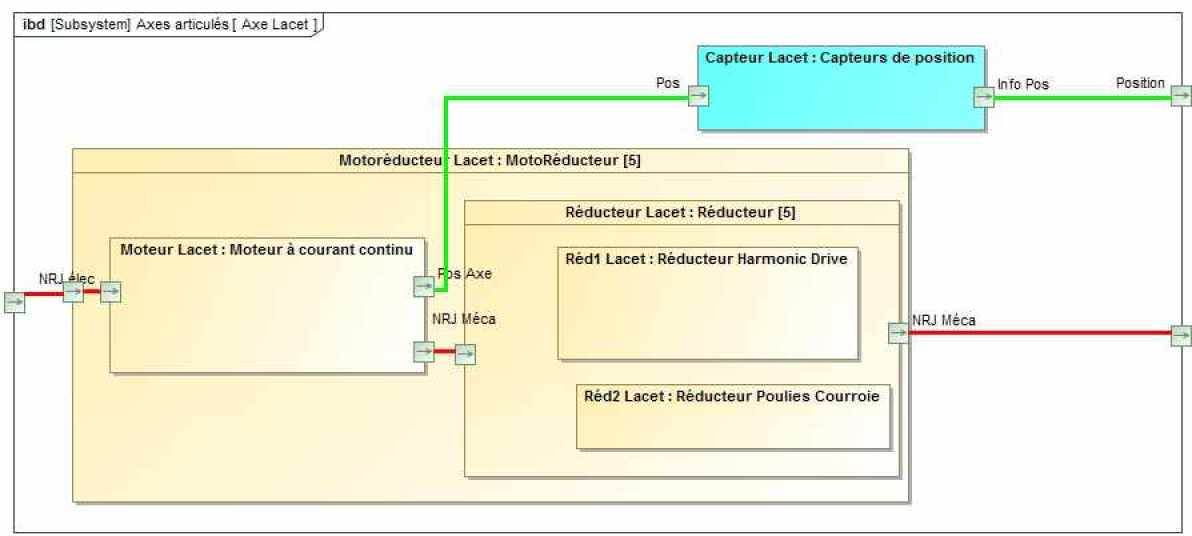
Les trois premiers axes (lacet, épaule et coude) sont organisés sur le même principe, qui comprend :
- un moteur à courant continu ;
- un premier réducteur à fort rapport de réduction « Harmonic Drive » ;
- suivi d'un second réducteur poulie-courroie ;
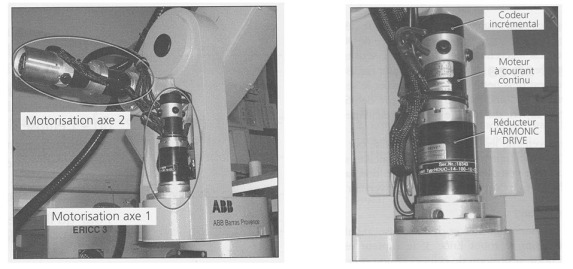
- un codeur incrémental angulaire (ou roue codeuse) qui permet de mesurer la vitesse de rotation et la position angulaire de l'axe.
« Regarder la vidéo ci-dessous présentant le fonctionnement de l'axe de lacet. »
« Repérer le moteur, les 2 réducteurs et le codeur incrémental sur la vidéo. »
« Repérer le moteur, les 2 réducteurs et le codeur incrémental sur les axes de lacet, épaule et coude du système réel. »




