
Mise en œuvre
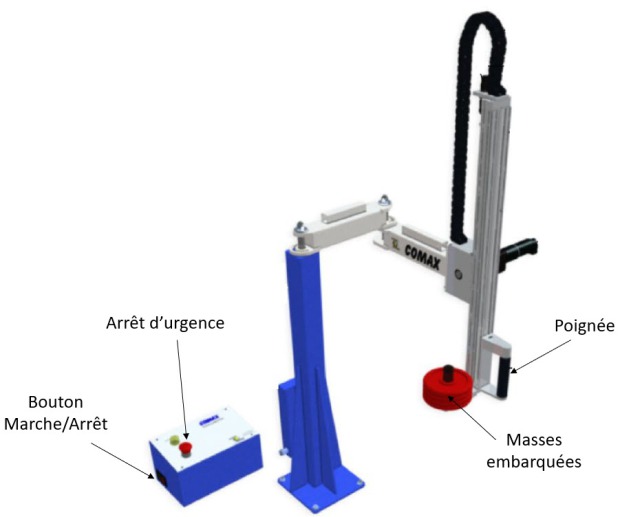
Vérifier que le bras est en position basse à l'aide la poignée.
Vérifier qu'il y ait aucune masse embarquée.
Appuyer sur le bouton Marche/Arrêt.
Vérifier que le bouton d'arrêt d'urgence n'est pas enclenché (le dévisser selon le sens de la flèche)
Lancer le logiciel
« Interface CoMax »
(à partir du dossier maquette sur le bureau du PC) puis cliquer sur le bouton« continuer »
.Cliquer sur
« Connexion »
puis sur« Activation »
. L'axe se positionne par défaut en position Basse (Zp=+20mm). Ne pas cliquer sur« collaboration »
.Cliquer sur l'icône
« Positionner CoMax »
 et commander l'axe en position Inter (Zp=250mm), Haute (Zp=480mm) puis Basse (voir repères 1 et 2 image ci-dessous).
et commander l'axe en position Inter (Zp=250mm), Haute (Zp=480mm) puis Basse (voir repères 1 et 2 image ci-dessous).

Cliquer sur
« Collaboration »
. Tester le comportement de l'axe lors d'une action manuelle sur la poignée.
Placer alors 4 masses supplémentaires de 1 kg sur le support de masse, sans oublier de les sécuriser à l'aide de la pince ressort de blocage. Tester à nouveau le comportement collaboratif.
Enlever les masses additionnelles du support de masses.
Désactiver la commande "Collaboration" et commander l'axe en position Basse.
TOUT EN TENANT LA POIGNÉE, placer le sélecteur
« Activation »
sur la position 0 et vérifier la réversibilité des transmetteurs.




