
La chaîne d'information
Les 6 chaînes de puissance sont commandées par 1 chaîne d'information.
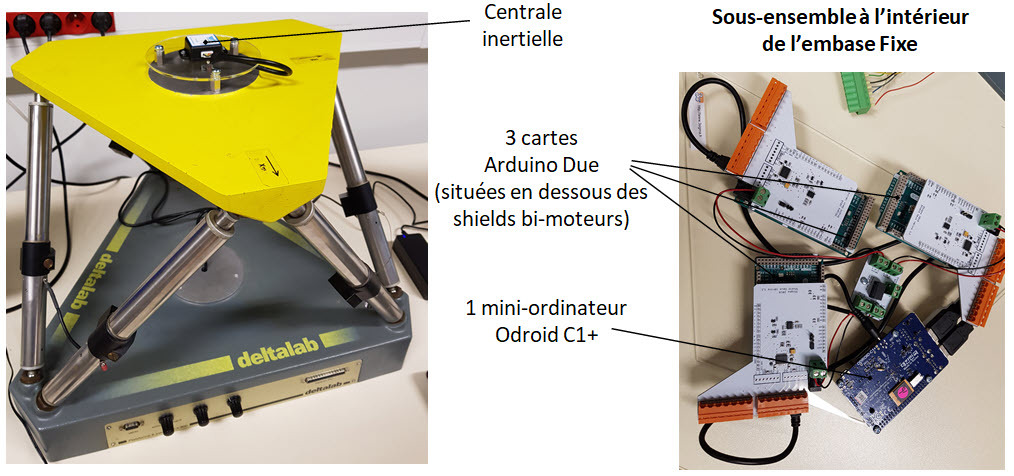
Dans l'image ci-dessous, on retrouve l'organisation de cette chaîne d'information, et notamment l'élément central, un mini-ordinateur Odroid C1+.
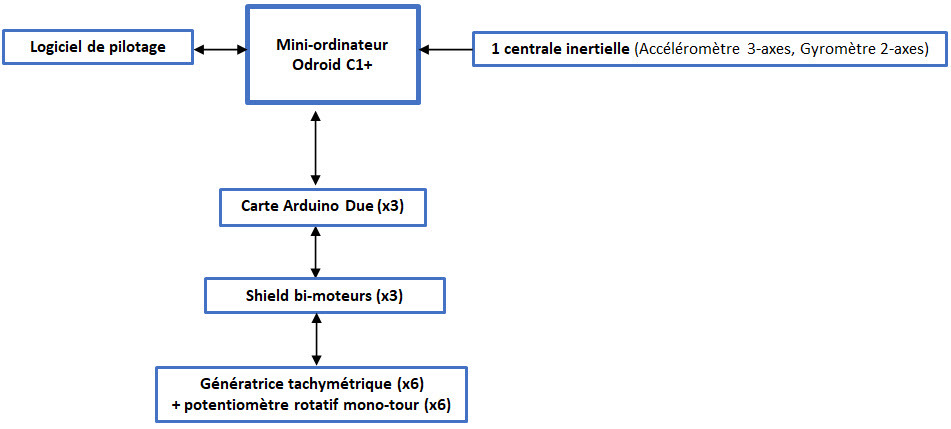
Selon le schéma ci-dessus :
Ce mini-ordinateur Odroid C1+ (de forme identique à la célèbre carte Raspberry Pi, mais avec de meilleures performances et plus fiable) gère directement :
- les consignes (position et vitesse) en provenance d'un port RJ45 (périphérique de communication) pour communiquer avec le logiciel de pilotage ;
- les mesures (position et vitesse) issues de la centrale inertielle ;
Toujours selon le schéma ci-dessus, ce mini-ordinateur Odroid C1+ commande et échange
NB : la centrale inertielle permet de mesurer les 2 angles phi et thêta des paramètres géométriques opérationnels (dits cartésiens dans ce logiciel).
Les 3 cartes Arduino Due, gèrent les 6 axes, notamment :
- les commandes des 3 shields bi-moteurs (pré-actionneur) ;
- les mesures (position et vitesse) issues de 6 potentiomètres rotatifs monotours et de 6 génératrices tachymétriques.
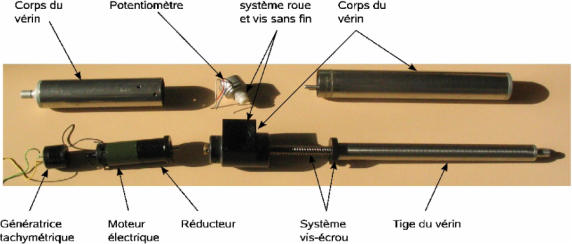
NB1 : un potentiomètre rotatif monotour permet de mesurer l'angle de rotation de la vis d'un axe par rapport au bâti. Comme ce capteur ne peut faire qu'un seul tour, un réducteur de vitesse secondaire roue-vis sans fin a été placé pour adapter le nombre de tours de la vis à la mesure effectuée par le potentiomètre monotour. La vis sans fin et la vis sont liées, et donc elles tournent à la même vitesse angulaire par rapport au corps de vérin.
NB2 : une génératrice tachymétrique permet de mesurer la vitesse du rotor moteur d'un axe par rapport au stator moteur.
Ces 2 capteurs sont associés respectivement à des CAN (Convertisseur Analogique Numérique).
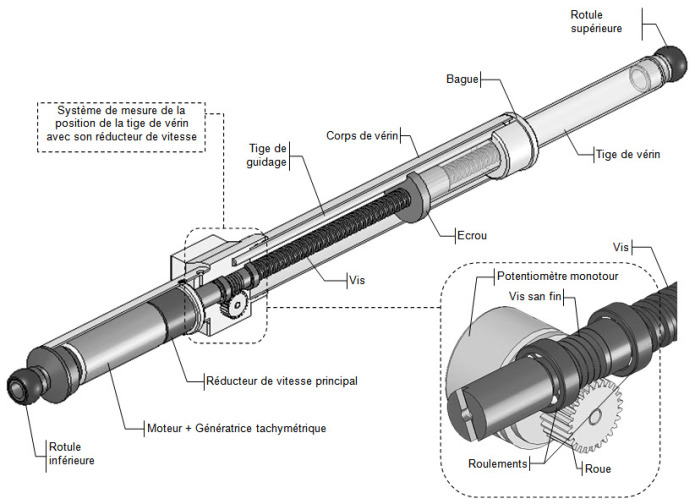
Visionner ci-dessous le fonctionnement du réducteur secondaire (roue et vis sans fin).
«
Repérer dans la mallette, les capteurs (potentiomètre rotatif monotour et génératrice tachymétrique), ainsi que le réducteur de vitesse secondaire roue-vis sans fin. »




