La chaîne d'information
La chaîne de puissance est commandée par 1 chaîne d'information, constituée principalement de :
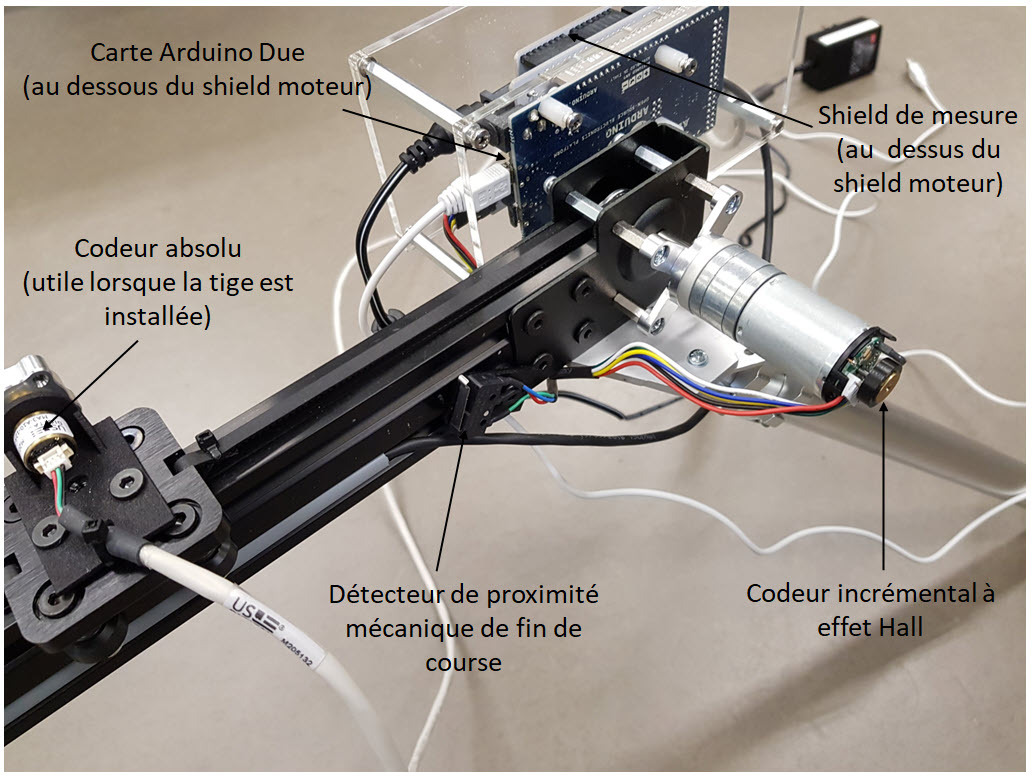
1 codeur incrémental à effet Hall qui mesure le déplacement angulaire et la vitesse angulaire de l'axe moteur. Il est situé à une extrémité du moteur à courant continu ;
1 codeur absolu à effet Hall qui mesure la position angulaire et la vitesse angulaire de la tige (lorsque celle-ci est utilisée) ;
2 détecteurs de proximité TOR mécaniques qui détectent les positions extrêmes (dites de fin de course) gauche et droite du chariot ;
1 carte Arduino Due ;
1 contrôleur USB pour communiquer avec le logiciel de pilotage.
« Repérer TOUS les éléments ci-dessus, sur le système réel. »