3. Importer une carte Arduino Uno
La bibliothèque de composants est située dans la partie droite de la fenêtre.
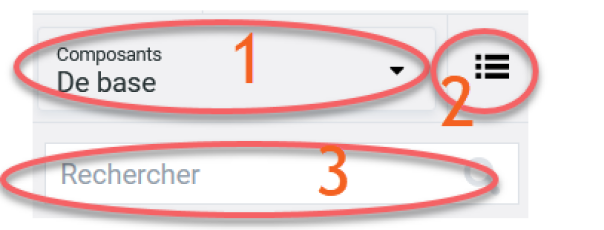
1. Cliquer et afficher les composants de base.
2. Cliquer et afficher la vue compacte des composants.
3. Zone qui vous permettra de rechercher un composant non standard en tapant un mot clé.
Sélectionner une carte Arduino Uno et la déposer dans la fenêtre centrale.
