5. Écrire le code
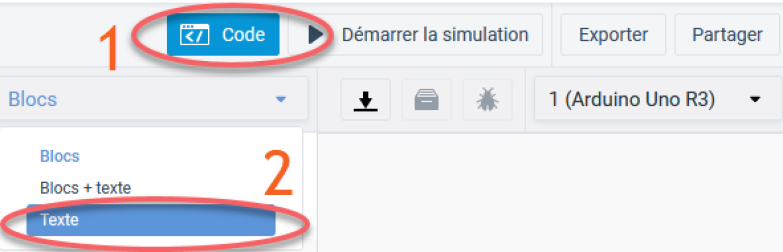
Cliquer sur « Code » puis sélectionner « Texte ».
Écrire un programme selon les explications données dans les autres parties de ce tutoriel.
Cliquer sur « Code » puis sélectionner « Texte ».
Écrire un programme selon les explications données dans les autres parties de ce tutoriel.