Les moteurs à courant continu (DC)
Fonction

Un moteur à courant continu convertit une puissance électrique en puissance mécanique de rotation.
Fonctionnement
Le moteur à courant continu est très simple à utiliser, câblé dans un sens il tournera dans un sens, câblé dans le sens contraire il tournera dans le sens contraire.
Du fait qu'il soit alimenté par un tension continue, on peut faire varier sa vitesse en utilisant :
- une alimentation avec une tension continue réglable ;
- une alimentation délivrant un signal carré dont la tension maximale est la tension maximale acceptée par le moteur. En faisant varier la fréquence de ce signal carré, on obtient une tension "moyenne" qui est envoyée au moteur. Ce principe est appelé PWM (Modulation de largeur d'impulsion).
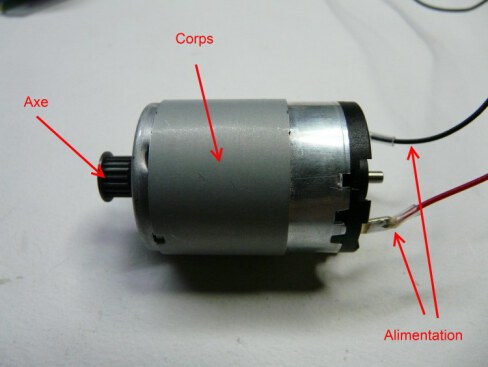
Principaux éléments d'un moteur à courant continu (DC)


Un moteur DC est constitué de 3 parties :
- le stator (corps ou inducteur) qui est fixe;
- le rotor (induit)(=axe+bobine) qui est mobile ;
- les balais.

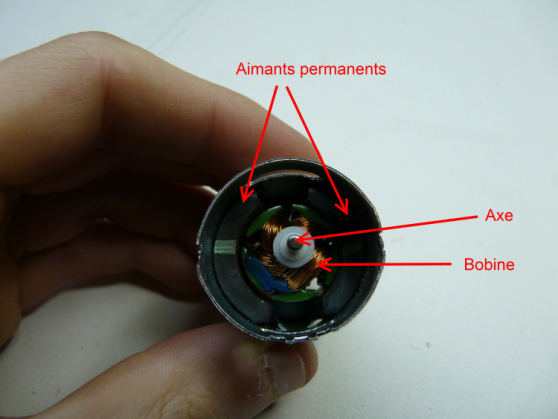
Le stator (ou inducteur)
A l'intérieur du stator, se trouvent deux gros aimants appelés "aimants permanents", qui vont créer un champ magnétique.
Parfois, ces aimants sont réalisés électriquement par un bobinage. On parle d'électroaimant (voir partie actionneur électro-aimant pour comprendre son fonctionnement : constituant qui produit un champ magnétique lorsqu'il est alimenté par un courant électrique : il convertit donc une puissance électrique en puissance magnétique).
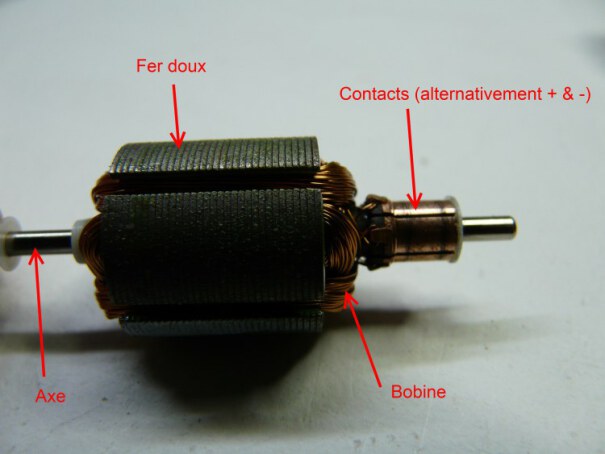
Le rotor (ou induit)
Le rotor est constitué :
- d'un axe ;
- d'une bobine entourée par une âme en fer doux ;
- de collecteurs (contacts) sur lesquels viendront frotter les balais.
Le rotor est placé dans le stator, entre les deux aimants permanents. Un jeu très minime (entrefer) existe entre le stator et le rotor afin que ces derniers ne se touchent pas.
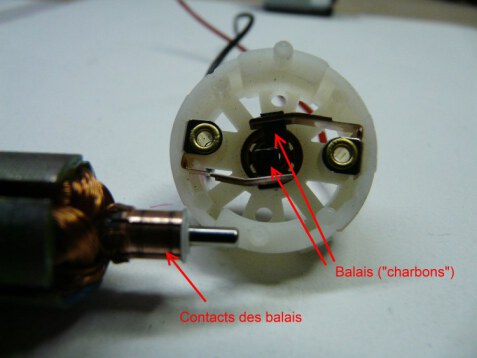
Les balais (ou charbons)
Les balais (charbons) distribuent le courant électrique à la bobine du rotor par l'intermédiaire des collecteurs (contacts).
La panne la plus fréquente est due à l'usure des balais sous l'effet de la vitesse et des frottements. Il suffit de les changer pour faire repartir le moteur.
Force de Laplace
Un fil conducteur parcouru par un courant et placé dans un champ magnétique est soumis à une force appelée force de Laplace. Cette force est :
- perpendiculaire au plan formé par le champ magnétique et le fil conducteur.
- proportionnelle à l'intensité du courant, à l'intensité du champ magnétique et à la longueur du fil conducteur.
Fonctionnement détaillé d'un moteur à courant continu (DC)
Sur la vidéo ci-dessus :
- le stator est représenté par l'aimant ;
- seule une spire de la bobine du rotor a été représentée ;
- les balais qui frottent sur les 2 collecteurs (demi-cylindres rouge et bleu) sont les pièces "brush".
Les collecteurs (demi-cylindres rouge et bleu) sont câblés de manière à ce que le courant qui circule dans l'unique spire du rotor change de sens tous les demi-tours, entraînant par la même occasion le changement de sens de la force de Laplace :
Temps t=0 : la bobine est alimentée en + / -, une force de Laplace se crée provocant la rotation du rotor d'un demi-tour.
Temps t=1 : le rotor a fait un demi-tour, les collecteurs se sont inversés, la bobine se retrouve alimentée en – / +, une force de Laplace se crée dans le sens inverse à celle précédente, le rotor continue et fait donc un demi-tour de plus.
Temps t=2=0, les collecteurs se sont encore inversés, la bobine se retrouve alimentée en + / -, ...
Réalisation d'un moteur à courant continu (DC)
Remarques
Le courant électrique passant dans des fils ayant une résistance « R », entraîne une perte d'énergie par chaleur : l'effet joule « RI2 ». C'est là, la principale perte énergétique des moteurs électriques, mais elle reste assez faible comparativement à d'autres actionneurs.
En pratique, les moteurs tournent vite (3000 tr/min) et fournissent un couple (effort tournant) assez faible. On y remédie en ajoutant un réducteur de vitesse (qui est également un multiplicateur de couple)).
Le moteur à courant continu permet une régulation précise du couple (effort tournant) et de la vitesse angulaire.
Le moteur à courant continu est en revanche moins robuste et beaucoup plus cher que les moteurs asynchrones (fonctionnant avec du courant alternatif), tant en coût matériel qu'en maintenance, car il nécessite un entretien régulier du collecteur et des balais.
Modèle de connaissance d'un moteur à courant continu (DC) (A LIRE uniquement si vous avez vu le cours sur les asservissements)
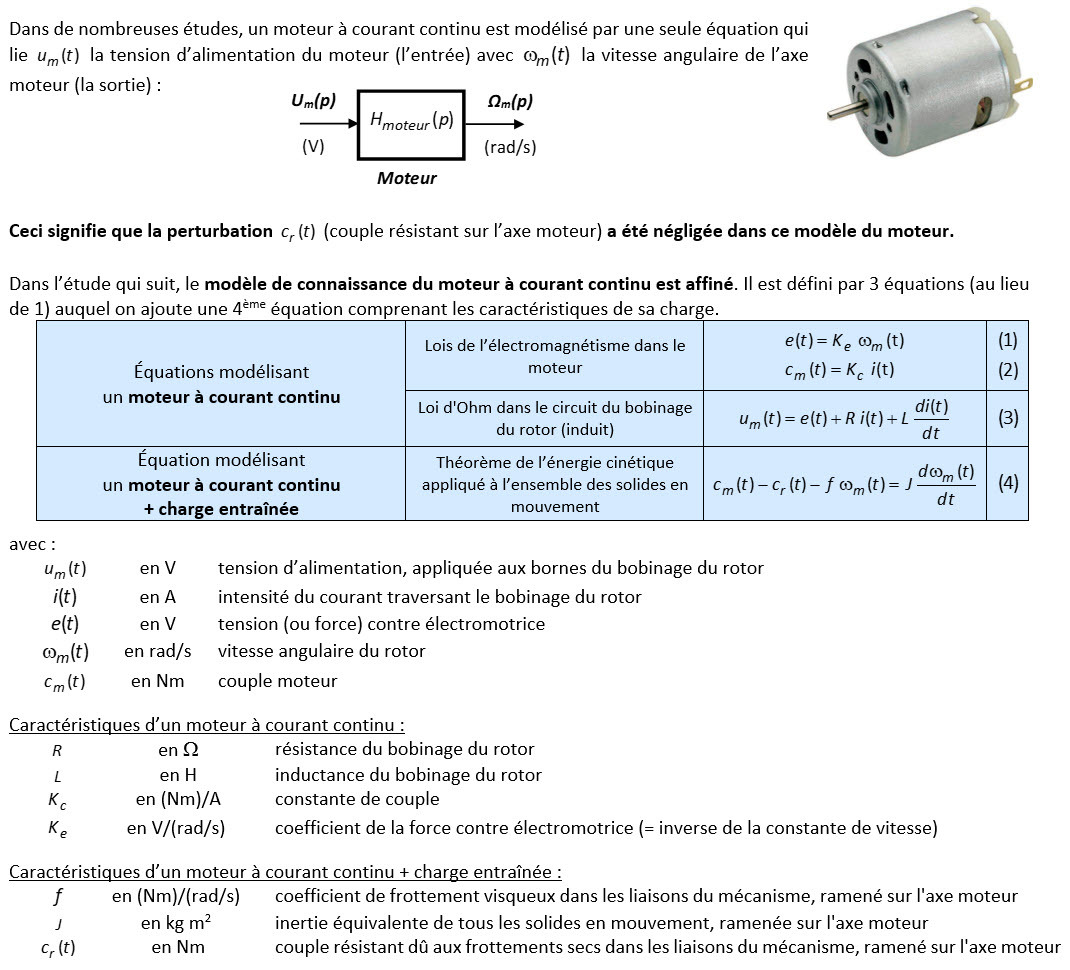
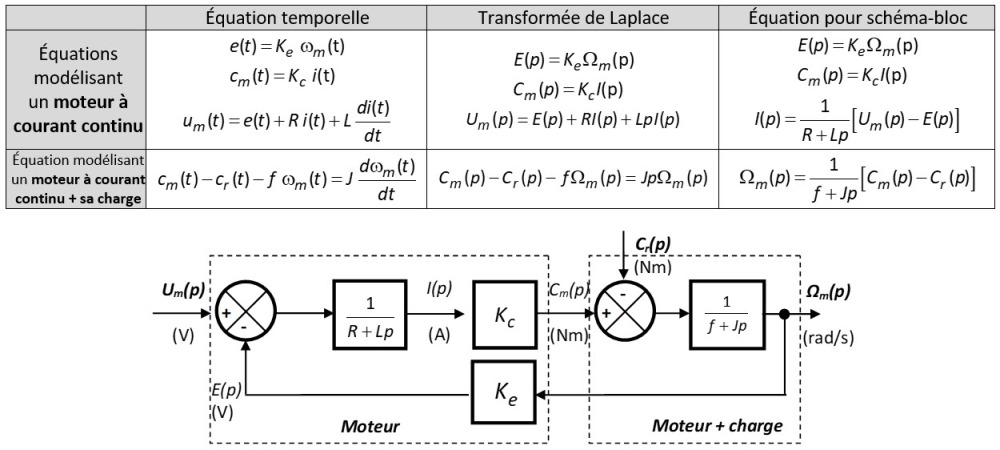
Dans le cas où toutes les conditions initiales sont nulles, les transformées de Laplace de ces équations sont :
La grandeur de sortie n'est pas de même nature que la grandeur d'entrée. Il n'y a pas de capteur.
Ce schéma représente la structure des équations différentielles du modèle de connaissance d'un moteur, et non pas un modèle asservi...