Mise en œuvre
1/ Lancer le logiciel et initialisation
vérifier que le bouton coup de poing « arrêt d'urgence » ne soit pas enclenché (ou enfoncé) ;
allumer le système à l'aide de l'interrupteur situé sur sa façade gauche ;
sur le bureau du PC, cliquer sur le dossier Maquette, puis sur le dossier Maxpid, et sélectionner le logiciel « Maxpid » ;
établir la connexion
 ;
;cliquer sur ok dans le message suivant. Le robot descend alors jusqu'en butée basse, et remonte jusqu'au 0°. Le robot est alors asservi.
2/ Piloter
cliquer sur Paramétrer Maxpid
 ;
;régler les valeurs par défaut du correcteur en cliquant sur l'icône
 .
.cliquer sur "ÉCRIRE dans la carte de commande" avant de sortir en appuyant sur la croix ;
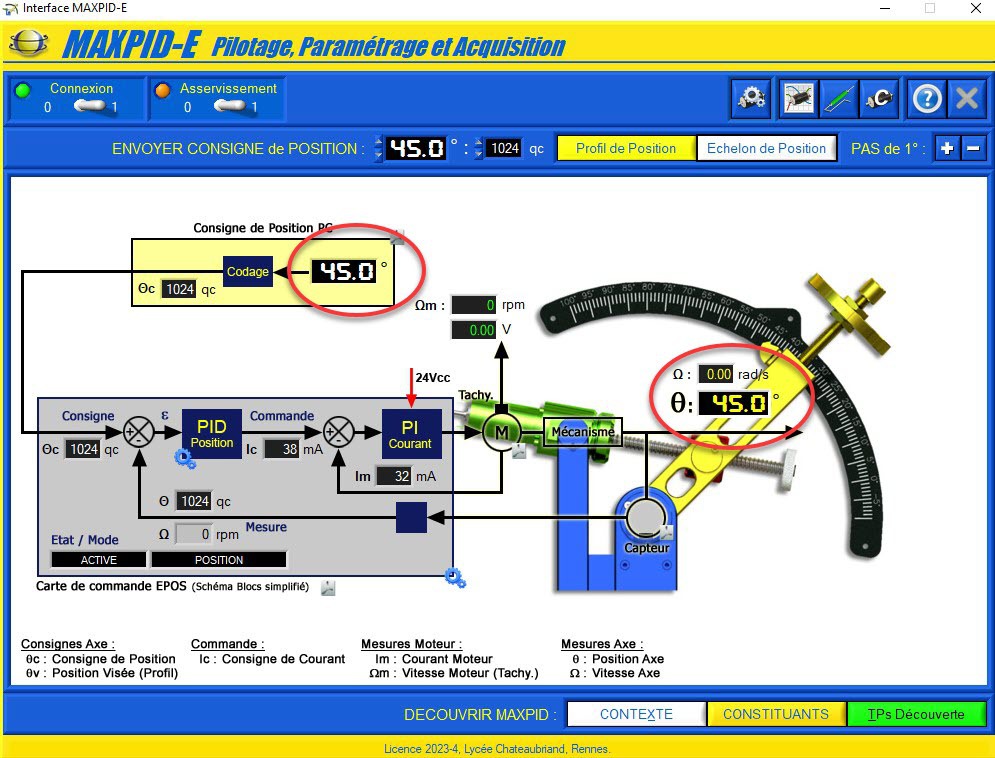
dans la fenêtre principale et à l'aide de l'objet « ENVOYER CONSIGNE de POSITION », saisir la position souhaitée en degré (45° sur l'exemple ci-dessous)

cliquer sur le bouton « Échelon de position », la demande de position est envoyée à la carte de commande MAXPID, le bras se positionne autour de 45°, l'axe MAXPID est asservi à la position demandée.