
Pilotage à l'aide des paramètres géométriques opérationnels (dits cartésiens dans ce logiciel)

La plate-forme peut être pilotée de 2 manières différentes :
soit en pilotant la position linéaire de la tige de chaque vérin électrique, à l'aide des 6 paramètres géométriques articulaires : Li. Le débattement limite de ces vérins est précisé ci-dessus ;
soit en pilotant la position et l'orientation de la plate-forme Mobile / embase Fixe, à l'aide des 6 paramètres géométriques opérationnels : x, y, z, phi, thêta, psi.
NB1 : Les 3 paramètres phi, thêta, psi sont couramment utilisés dans l'aéronautique et sont nommés angles d'Euler (voir vidéo ci-dessous qui explique le principe).
Attention : dans cette vidéo, on tourne d'abord autour de z, puis autour du nouveau x, puis autour du nouveau z, alors que pour la plate-forme, on tourne d'abord autour de x (
 ), puis autour du nouveau y (
), puis autour du nouveau y (
 ), puis autour du nouveau z (
), puis autour du nouveau z (
 ).
).NB2 : le pilotage à l'aide des paramètres géométriques opérationnels est possible, car dans la carte de commande, les relations entre les paramètres géométriques articulaires et les paramètres géométriques opérationnels ont été saisies. Ainsi, les consignes opérationnelles sont immédiatement traduites en consignes articulaires.
La procédure ci-dessous explique uniquement le pilotage à l'aide des paramètres géométriques opérationnels (dits cartésiens dans ce logiciel).
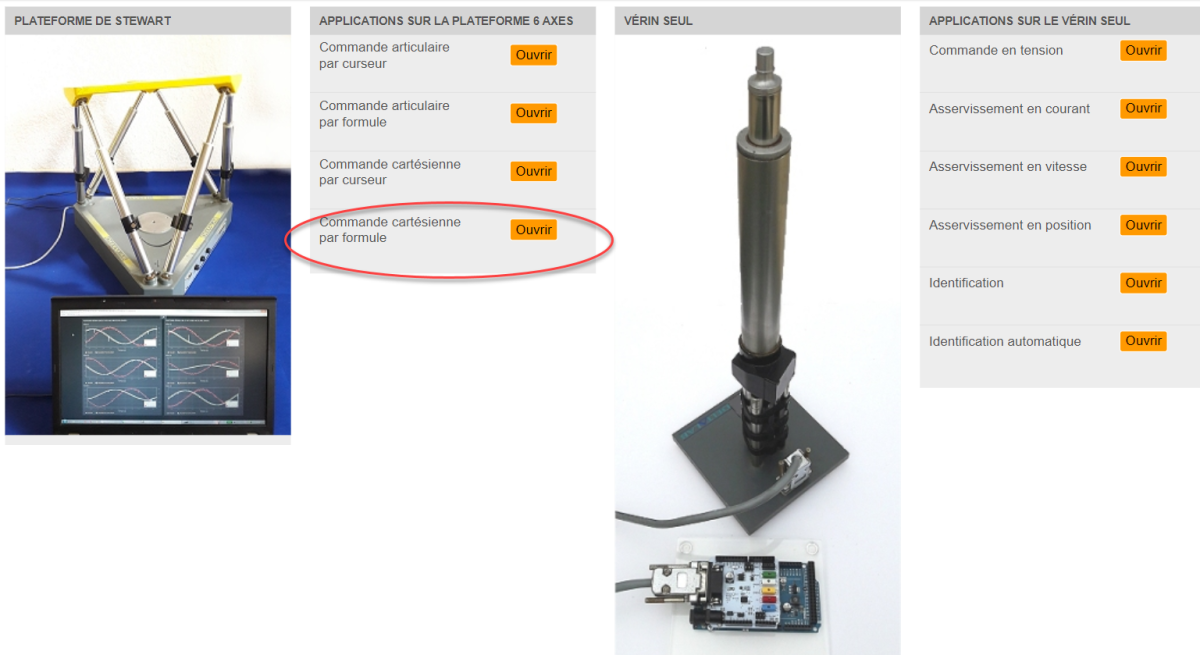
Ouverture de l'application pilotage à l'aide des paramètres géométriques opérationnels (dits cartésiens dans ce logiciel)
Ouvrir l'application "Commande cartésienne (par formule)" :
Connexion et configuration
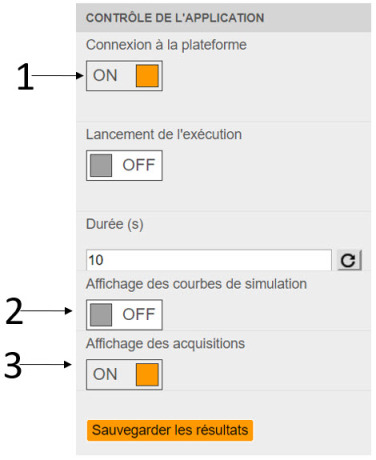 | La procédure de démarrage se fait en suivant les étapes ci-dessous dans l'ordre : 1/ Cliquer sur le bouton ON de l’interrupteur « Connexion à la plate-forme ». 2/ Cliquer sur le bouton OFF de l'interrupteur « Affichage des courbes de simulation » . 3/ Cliquer sur le bouton ON de l'interrupteur « Affichage des acquisitions », afin d'obtenir des courbes issues de mesures réalisées sur la plate-forme. |
Pilotage de la plate-forme
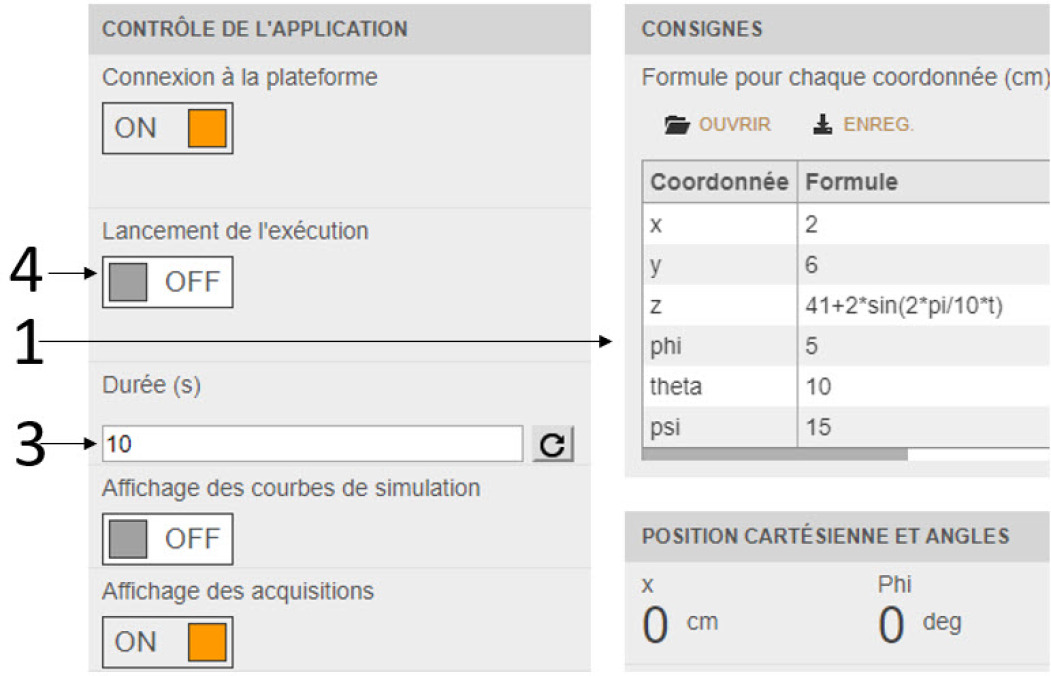 | 1 / Au niveau de la zone consigne (voir image ci-contre) : indiquer dans le tableau, les valeurs des consignes opérationnelles en cm et en deg :
NB1 :
NB2 : Attention : les débattements articulaires limités des
2/ Avant de lancer un essai, imaginer toujours la position que la plate-forme mobile va prendre... 3/ Indiquer la durée de l'essai. Exemple : 10 s. 4/ Cliquer sur le bouton ON de l'interrupteur « Lancement de l'exécution ». L'exécution se lance après 20 s d'attente... |








Les graphiques permettent de visualiser l'évolution des différents paramètres durant la durée de l'essai.
Autres essais à effectuer plusieurs fois, et en faisant en sorte que la plate-forme mobile soit dans sa position initiale au début de l'essai :
- piloter la plate-forme mobile en faisant varier uniquement les valeurs d'un seul paramètre opérationnel, afin de bien comprendre le sens et le 0 de chaque paramètre opérationnel ;
- piloter la plate-forme mobile pour qu'elle ait un mouvement de translation à trajectoire rectiligne dans le plan horizontal (peu importe l'amplitude du mouvement, peu importe la direction) ;
- piloter la plate-forme mobile pour qu'elle ait un mouvement de rotation dans le plan horizontal (peu importe l'amplitude du mouvement) ;
- piloter la plate-forme mobile pour qu'elle ait un mouvement de translation à trajectoire circulaire dans le plan horizontal (peu importe l'amplitude du mouvement). Ne pas passer plus de 5 min... et demander la solution au professeur.
NB : il est possible d'utiliser les fonctions cos, sin, tan, pi, abs, sqrt (racine carrée), sqr (carré), etc...
Mesures des « Positions vérins »
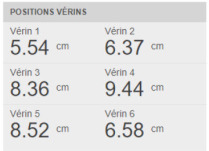 | Cette zone affiche les valeurs des 6 paramètres géométriques articulaires mesurées. |
Mesures de la « Position cartésienne et des angles »
 | Cette zone affiche pour les paramètres géométriques opérationnels : ◦ les valeurs de phi et thêta mesurées par la centrale inertielle ; ◦ les valeurs de x, y, z et psi calculées par le modèle cinématique à partir des paramètres géométriques articulaires mesurées. |
Mesures des vitesses angulaires
Cette zone affiche les valeurs des vitesses angulaires mesurées par la centrale inertielle.
Affichage de la trajectoire lorsque celle-ci est comprise dans un plan
Cliquer sur le bouton ![]() .
.
Puis, cliquer sur l'onglet " Tracé XY".
Il est possible de tracer des courbes paramétrées, comme par exemple : y = f(x)
La première variable sélectionnée sera placée automatiquement en abscisse.
La seconde variable sélectionnée sera placée en ordonnée.
Affichage des autres grandeurs
 | Dans la zone graphique, on peut visualiser uniquement l'évolution de certaines grandeurs durant la durée de l'essai. Pour visualiser les autres grandeurs, cliquer sur le bouton vérin i de la zone "exploration graphique". Puis, cliquer sur le premier onglet afin de tracer des grandeurs en fonction du temps. Ensuite, sélectionner les grandeurs utiles en cliquant sur leur légende. Il est possible également d'afficher les 6 paramètres géométriques opérationnels (dits cartésiens dans ce logiciel) en cliquant sur le bouton "Pos cart" ou le bouton "Angles et vit. angulaires". |




