Branchement et lancement du logiciel
La mise en œuvre du système se fait en suivant les différentes étapes ci-dessous. Si ce n'est pas déjà fait :
• brancher le convertisseur USB/Ethernet sur un port USB de l'ordinateur et l'autre extrémité sur le connecteur Ethernet RJ45 de la plate-forme ;
• brancher l'alimentation fournie sur le connecteur jack de la plate-forme et l'autre extrémité sur une prise 230V AC ;
• attendre environ 1 minute le démarrage du système ;
• lancer le logiciel MyViz (à partir du dossier maquette sur le bureau du PC) ;
• sélectionner le menu Applications / Accueil ;
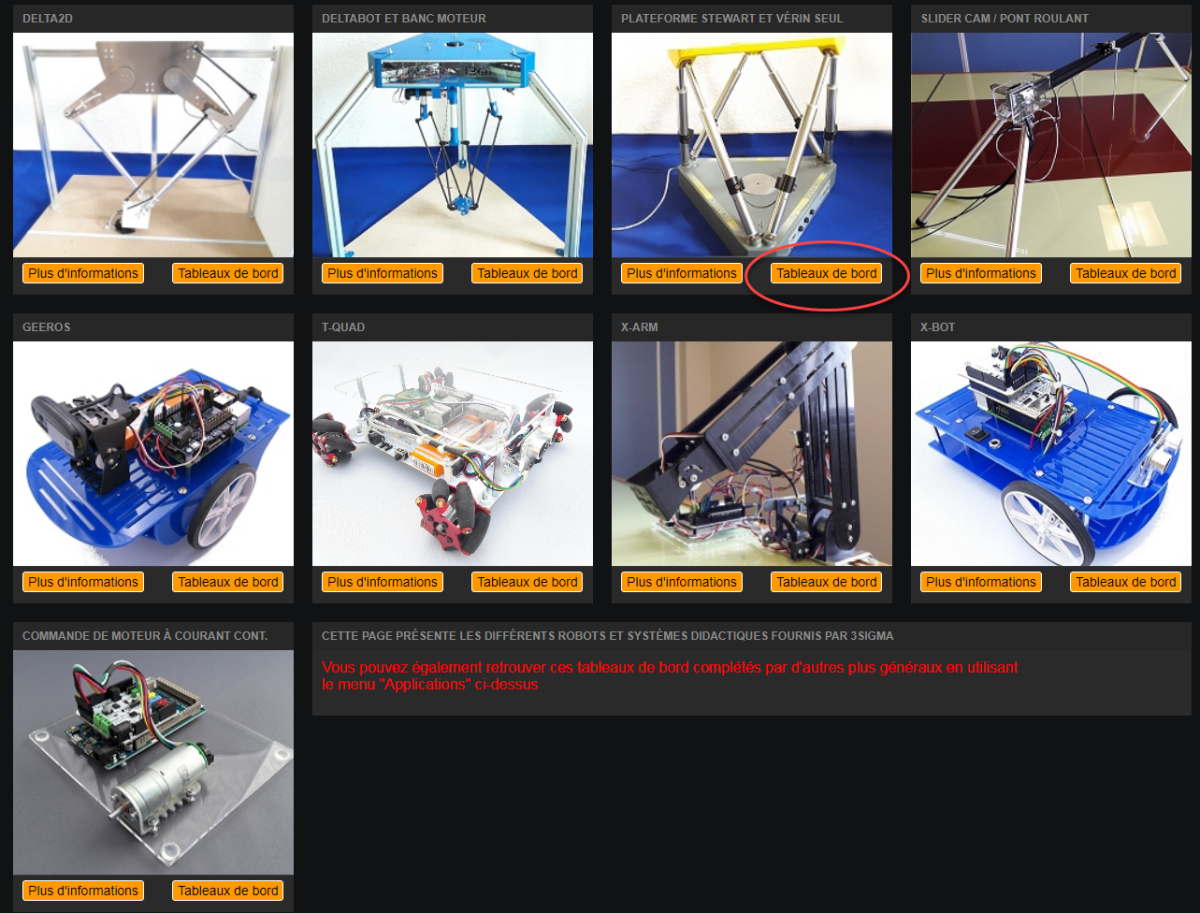
• sélectionner le système "Plate-forme stewart" en cliquant sur "Tableaux de bord" :