La chaîne d'information
Les 3 chaînes de puissance sont commandées par 1 chaîne d'information.
Dans l'image ci-dessous, on retrouve l'organisation de cette chaîne d'information, et notamment l'élément central, une carte Teensy 3.6.
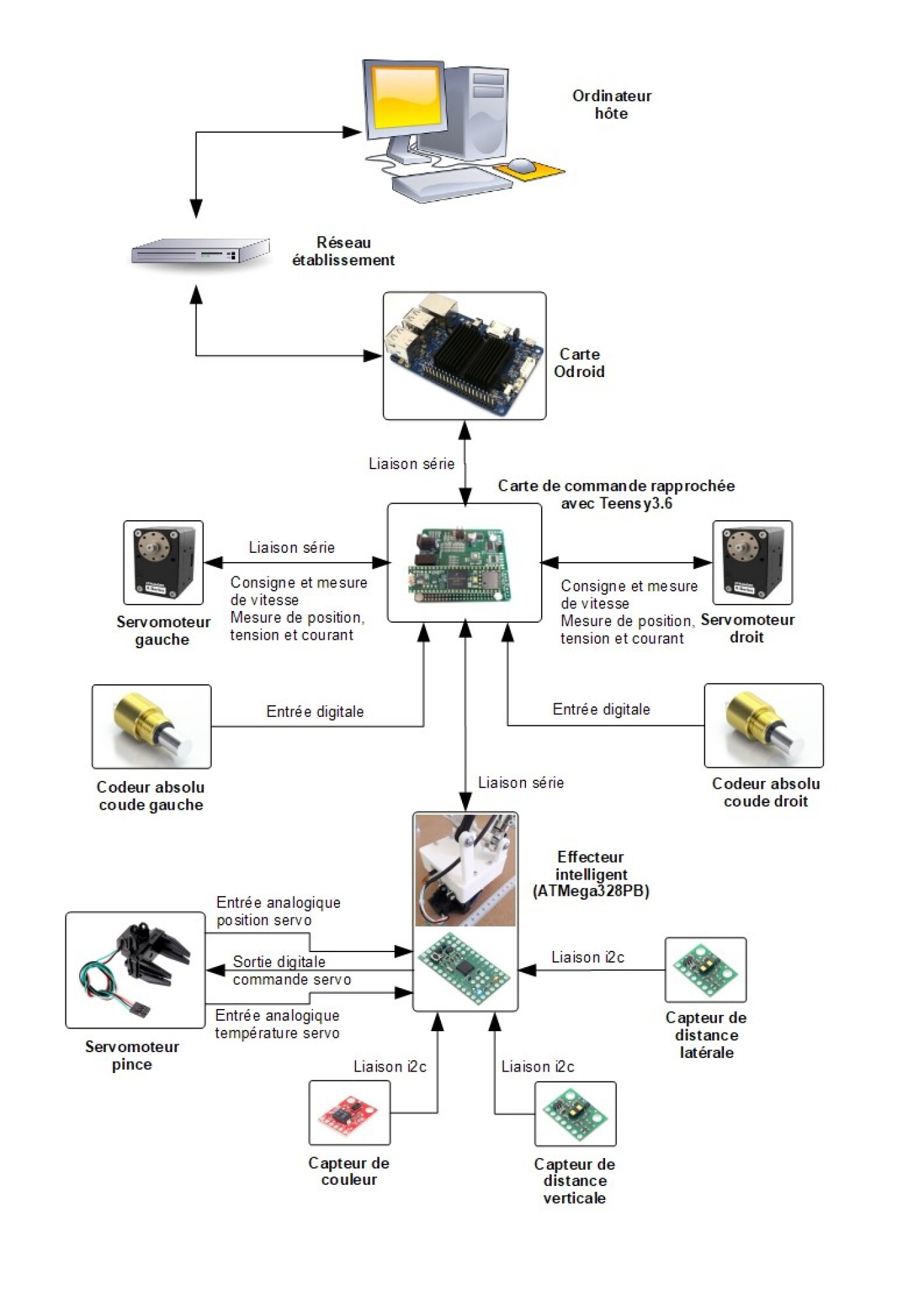
Selon le schéma ci-dessus :
La carte Odroid C1+ (de forme identique à la célèbre carte Raspberry Pi, mais avec de meilleures performances et plus fiable) gère directement les consignes (position et vitesse) en provenance d'un connecteur réseau RJ45 (périphérique de communication) pour communiquer avec le logiciel de pilotage.
Toujours selon le schéma ci-dessus, ce mini-ordinateur Odroid C1+ commande et échange
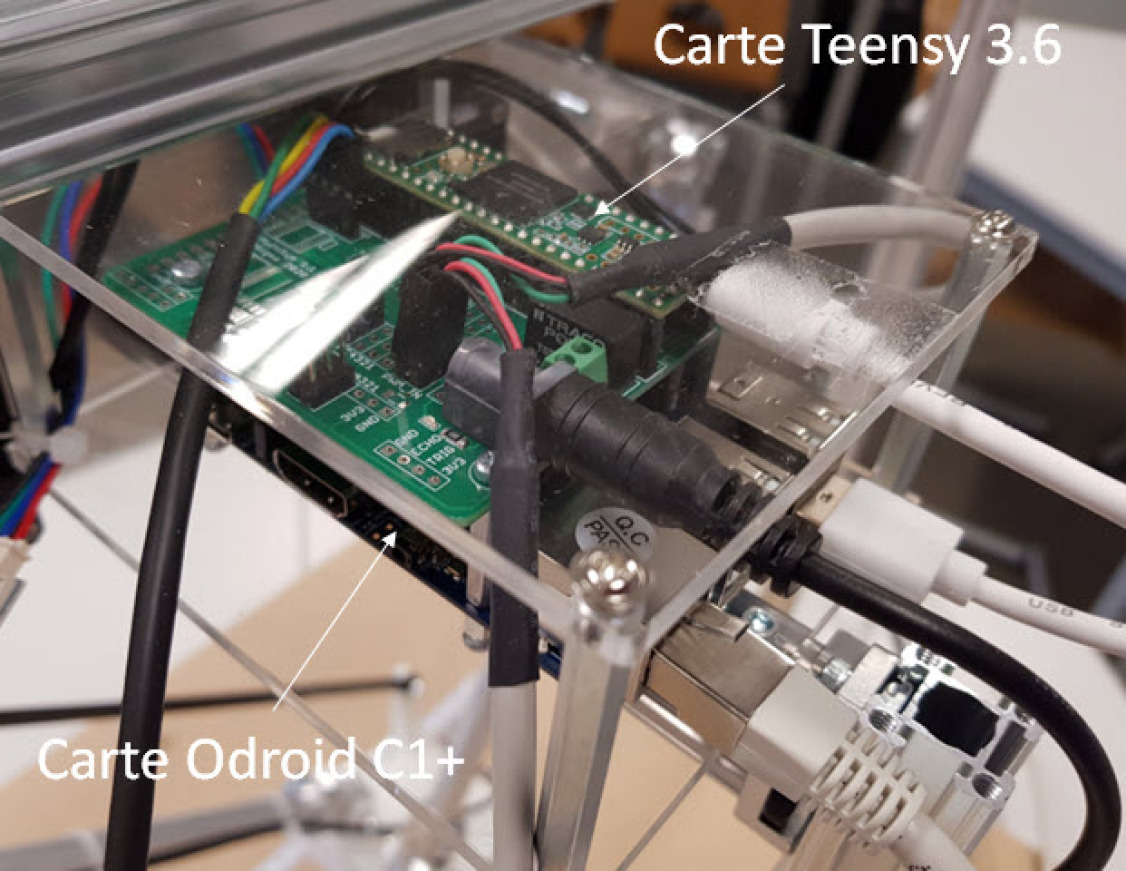
« Sur le système réel, repérer ces 2 cartes »
.
Rappel : les 2 servomoteurs comportent 2 codeurs absolus. Ils mesurent les angles \({\alpha}_1\) et \({\alpha}_2\).
Les 2 codeurs absolus "individuels" (voir image ci-dessous) mesurent quant à eux les angles \({\alpha}_3\) et \({\alpha}_4\).
Les 2 capteurs de distance mesurent respectivement :
• la distance entre la base de l'effecteur et le socle (capteur de distance verticale) ;
• la distance entre le côté droit de l'effecteur et le panneau latéral droit blanc (capteur de distance latérale) ;
Ces deux mesures permettent de connaître la position cartésienne de l'extrémité du robot pour (par exemple) la comparer avec les calculs réalisés à partir des angles des moteurs et des équations cinématiques directes.
Le capteur de couleur renvoie, entre autres, les 3 composantes Rouge – Vert – Bleu de l'objet qui se trouve dans son champ de détection.
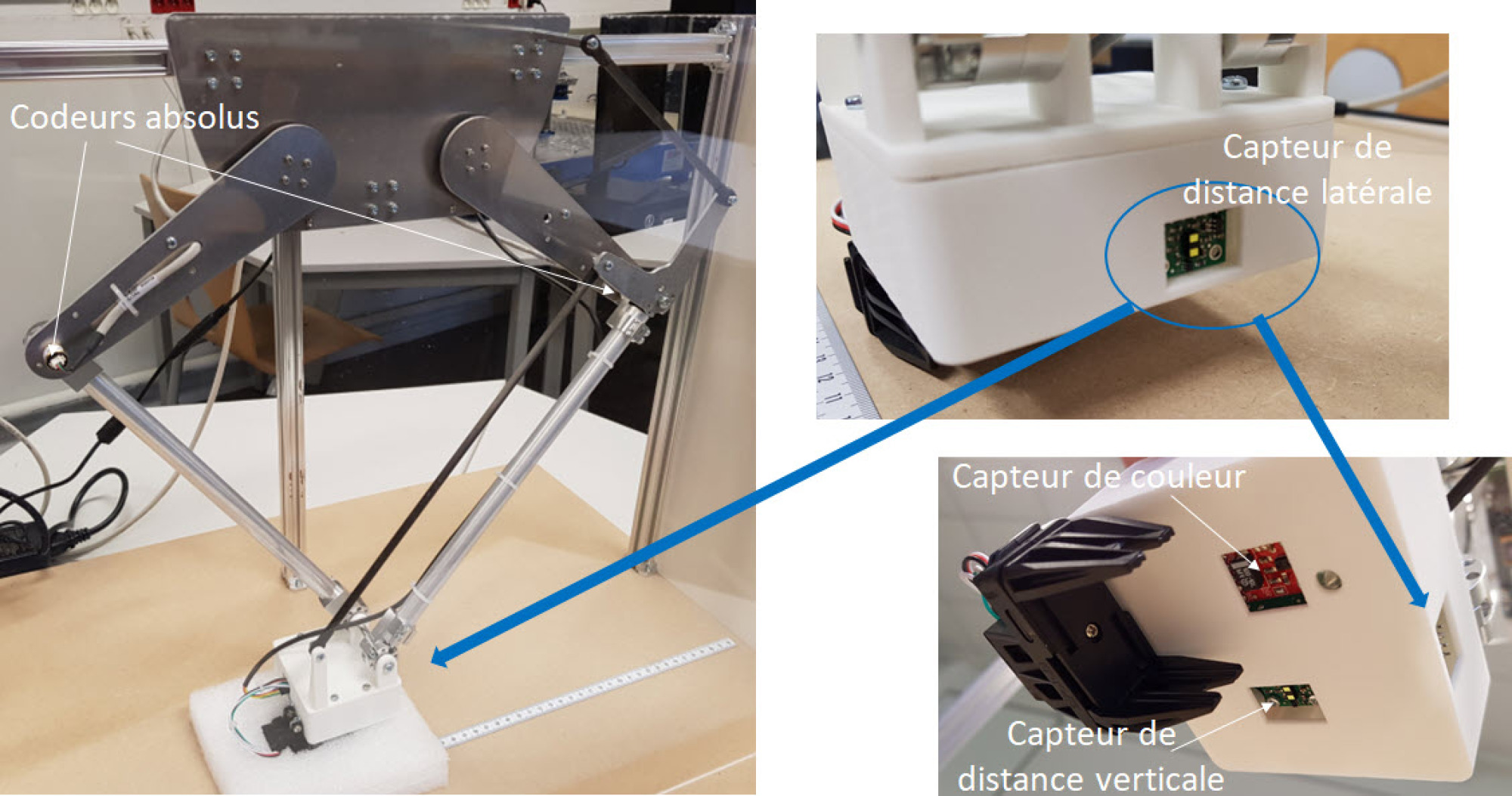
« Sur le système réel, repérer TOUS les éléments ci-dessus »
.