
Les 6 chaînes de puissance indépendantes
Le robot Ericc se caractérise par :
- 5 chaînes de puissance indépendantes, et quasi-identiques (une pour chaque axe), utiles pour le positionnement de la pince / socle ;
- 1 chaîne de puissance utile pour l'ouverture et la fermeture de la pince ;
Principe d'une chaîne de puissance pour un axe
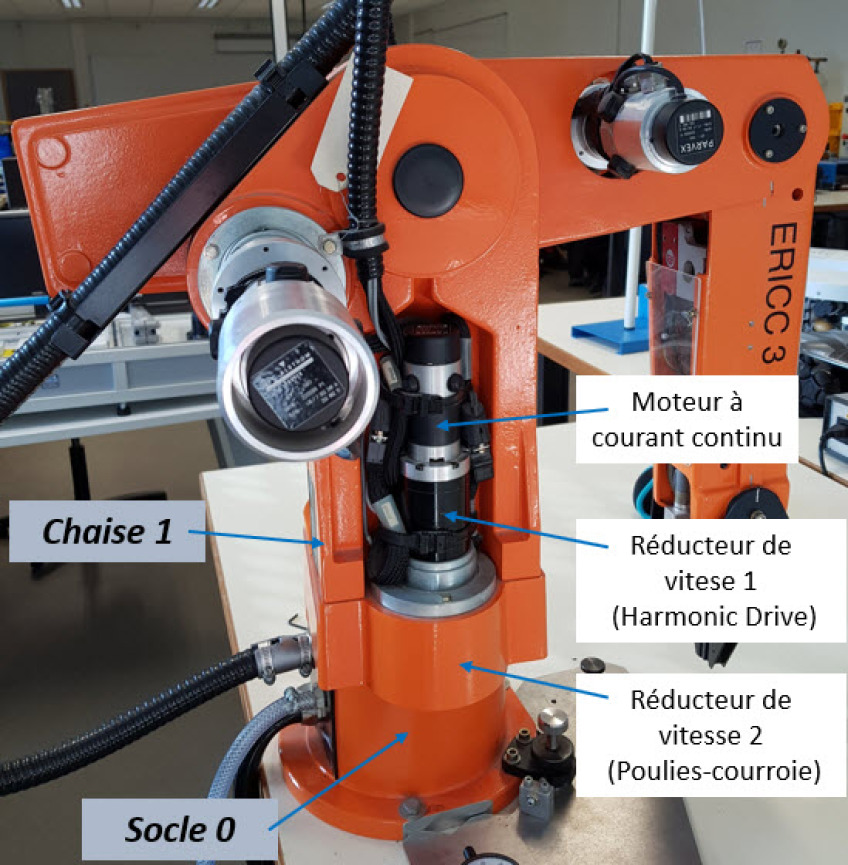
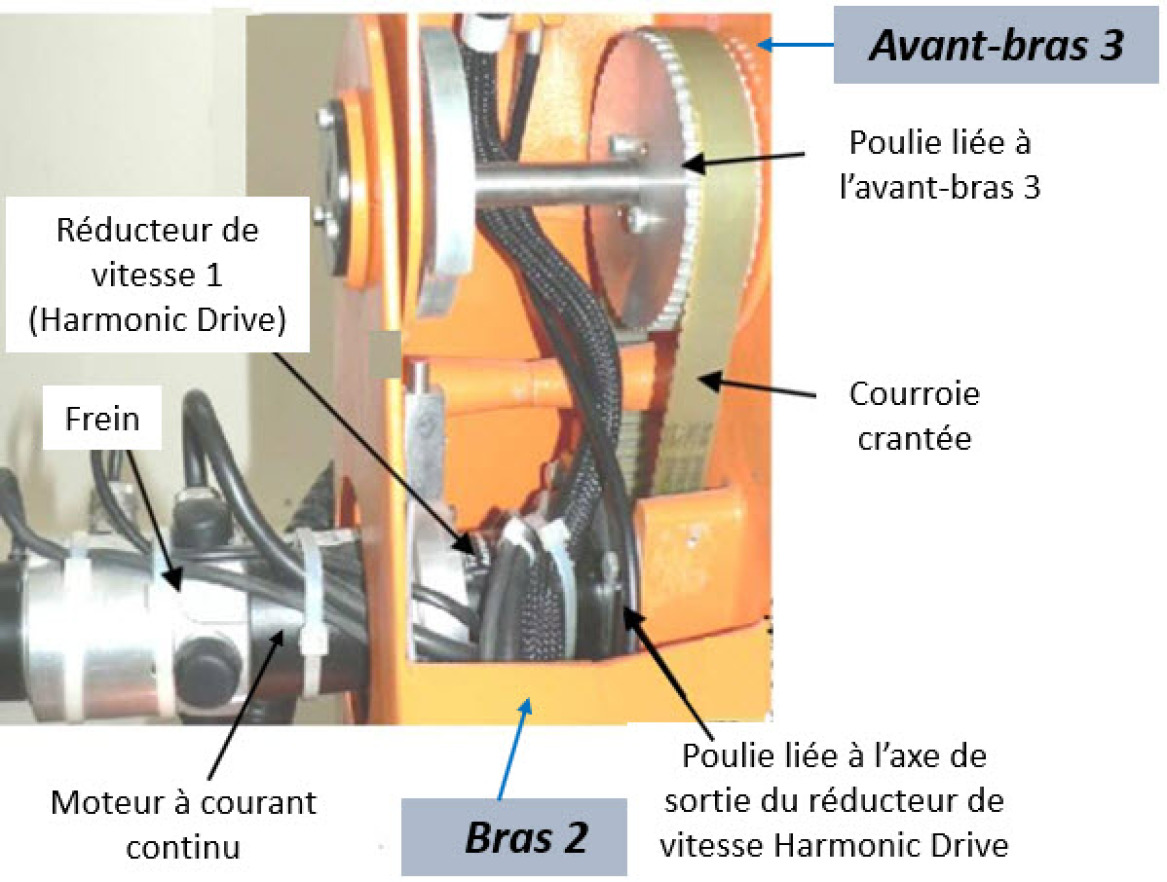
La chaîne de puissance partielle de chaque axe est constituée de : un transformateur +un variateur (pré-actionneur) + un moteur à courant continu + deux réducteurs de vitesse successifs.
NB1 : le coffret des variateurs électroniques (hacheurs) se situe sur la table (boîtier de grande taille avec bouton arrêt d'urgence). « Repérer ce boîtier. »
NB2 : les réducteurs de vitesse sont de différents types :

NB3 : les freins à "coupure de courant" ont pour rôle de bloquer les axes moteur, lorsqu'ils ne sont plus alimentés (c'est à dire à l'arrêt), afin que le robot reste immobile dans sa dernière position.
Ils ne sont utiles que pour les axes de l'épaule et du coude, dont l'action de pesanteur aurait tendance à mettre en mouvement ces 2 axes à l'arrêt.
« Sur le système réel, repérer tous les éléments ci-dessus de l'axe de lacet »
.

« Sur le système réel, repérer tous les éléments ci-dessus de l'axe de l'épaule »
.
« Sur le système réel, repérer tous les éléments ci-dessus de l'axe du coude »
.

« Sur le système réel, repérer tous les éléments ci-dessus de l'axe du poignet »
.

« Sur le système réel, repérer tous les éléments ci-dessus de l'axe de la pince »
.
« Sur le système réel, repérer le moteur à courant continu, les 2 réducteurs de vitesse pour chacun des 5 axes »
.
Cas de l'axe de lacet avec son moteur dit "embarqué" contrairement aux 4 autres axes
On peut remarquer que la première poulie est fixe par rapport au socle 0, et que la seconde poulie (solidaire de la chaise 1) est en mouvement. Voir vidéo ci-dessous.
Le moteur est dit "embarqué" car son stator est solidaire de la pièce en mouvement (ici la chaise 1).
« Repérer le moteur, les 2 réducteurs de vitesse sur la vidéo ci-dessus. »
Principe de la chaîne de puissance pour l'ouverture et la fermeture de la pince
« Observer le système réel et repérer l'actionneur (ici le vérin) qui permet d'ouvrir et fermer la pince. »
« Pour cela, partir de la pince, suivre la chaîne, puis la gaine, puis... »




