
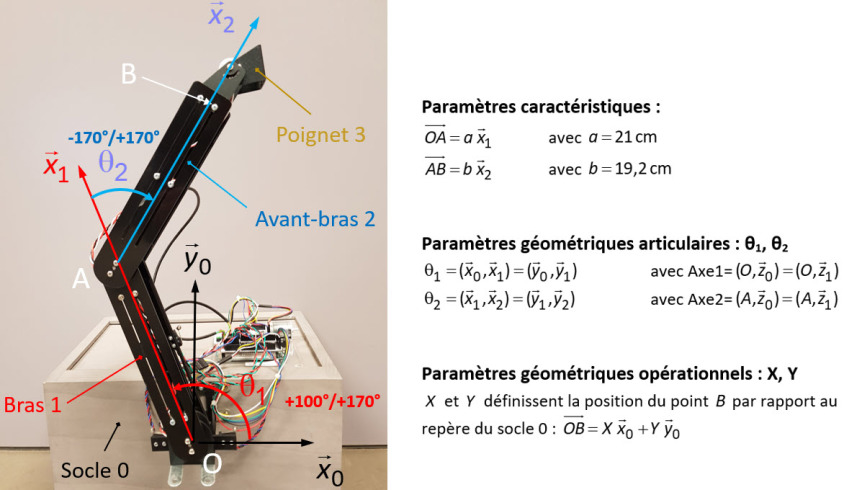
Pilotage à l'aide des paramètres géométriques articulaires
Le poignet peut être piloté de 2 manières différentes :
soit en pilotant la position angulaire de chaque axe, à l'aide des 2 paramètres géométriques articulaires :
 et
et
 (voir figure ci-dessus).
(voir figure ci-dessus). « Les débattements limites »
de ces angles sont précisés sur la figure ci-dessus par les valeurs positives et négatives.soit en pilotant la position du point B / socle 0, à l'aide des 2 paramètres géométriques opérationnels (dites cartésiennes dans ce logiciel) :
 ,
,
 .
.NB : le pilotage à l'aide des paramètres géométriques opérationnels est possible, car dans la carte de commande, les relations entre les paramètres géométriques articulaires et les paramètres géométriques opérationnels ont été saisies. Ainsi, les consignes opérationnelles sont immédiatement traduites en consignes articulaires.
La procédure ci-dessous explique uniquement le pilotage à l'aide des paramètres géométriques articulaires.
Ouverture de l'application pilotage à l'aide des paramètres géométriques articulaires
Ouvrir l'application "Pilotage en coordonnées articulaires".
Pilotage du robot
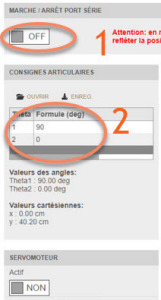 | 1/ Démarrer l'interaction en cliquant sur le bouton "MARCHE / ARRET" de l'interface MyViz. Avant de lancer un essai, imaginer toujours la position que le robot va prendre... Par exemple :
2 / Indiquer dans le tableau "consigne", les valeurs des consignes articulaires définissant la position finale que doit atteindre le robot. NB1 : les consignes articulaires effectivement envoyées au robot (après éventuelles saturations liées au domaine admissible) ainsi que leurs correspondances cartésiennes (calculées par le modèle cinématique) sont affichées au dessous du tableau. Si le robot risque de prendre une position impossible. Le programme de contrôle l'empêche, et les valeurs impossibles sont mises en gras. NB2 : Attention à ne pas saisir des valeurs, qui feraient approcher de la table, l'extrémité du robot, afin de ne pas forcer sur les pièces et les moteurs. NB3 : les graphiques permettent de visualiser l'évolution des différents paramètres de mouvement mesurés :
|



Mesures des « Coordonnées articulaires » et « Coordonnées cartésiennes »
 | Cette zone affiche : ◦ les valeurs des 2 coordonnées articulaires mesurées
◦ les valeurs des 2 coordonnées cartésiennes calculées par le modèle cinématique à partir des coordonnées articulaires mesurées. |
Pilotage du 3ème axe (celui avec le servomoteur)
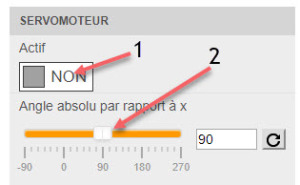 | 1. Cliquer sur NON afin de rendre actif le servo-moteur 2. Manipuler le curseur afin d'envoyer en continue une consigne angulaire au servomoteur. |
Arrêt
Arrêter l'interaction avec le bouton "MARCHE / ARRET".




