
Mise en situation
Robots à roues ou chenilles standards
De par leurs architectures mécaniques, les mouvements des robots mobiles à roues ou à chenilles sont souvent fortement contraints. En effet, ils ne peuvent pas effectuer de mouvements latéraux sans introduire de glissement. Exemples : - le iRobot 510 Packbot qui est utilisé par l'armée américaine pour vérifier le terrain (présence de bombes ou mines anti-personnelles) avant d'envoyer des soldats ; - le Curiosity qui a été envoyé sur Mars par la Nasa pour explorer et identifier le terrain martien. |  iRobot 510 Packbot |

Robots à roues Mecanum
Pour s'affranchir de cette contrainte, les roues Mecanum permettent à un véhicule de se diriger dans toutes les directions: aussi bien sur le côté que vers l'avant et l'arrière. Le robot est omnidirectionnel et peut se déplacer aisément dans des lieux très encombrés. C'est la combinaison de la rotation de la roue avec la rotation libre du galet en contact avec le sol qui permet un déplacement sans glissement dans toutes les directions. Exemples d'utilisation : | 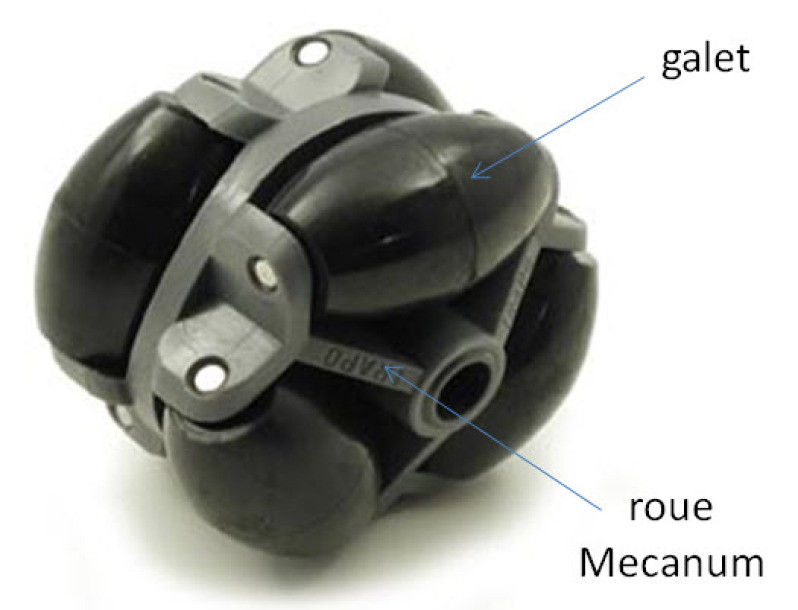 |




