
Utilisation du logiciel de pilotage
Poser le robot au sol et appuyer 3s sur son bouton de mise en route.
Le robot s'initialise et affiche son adresse IP : 172.26.201.4
Afin de connecter l'ordinateur au robot à l'aide du réseau wifi, cliquer droit sur l'icône du réseau wifi du PC, puis sélectionner robotino.
Lancer le logiciel Robotino View.
Attention : lors du pilotage à partir de ce logiciel, les capteurs de proximité et de chocs sont désactivés par défaut.
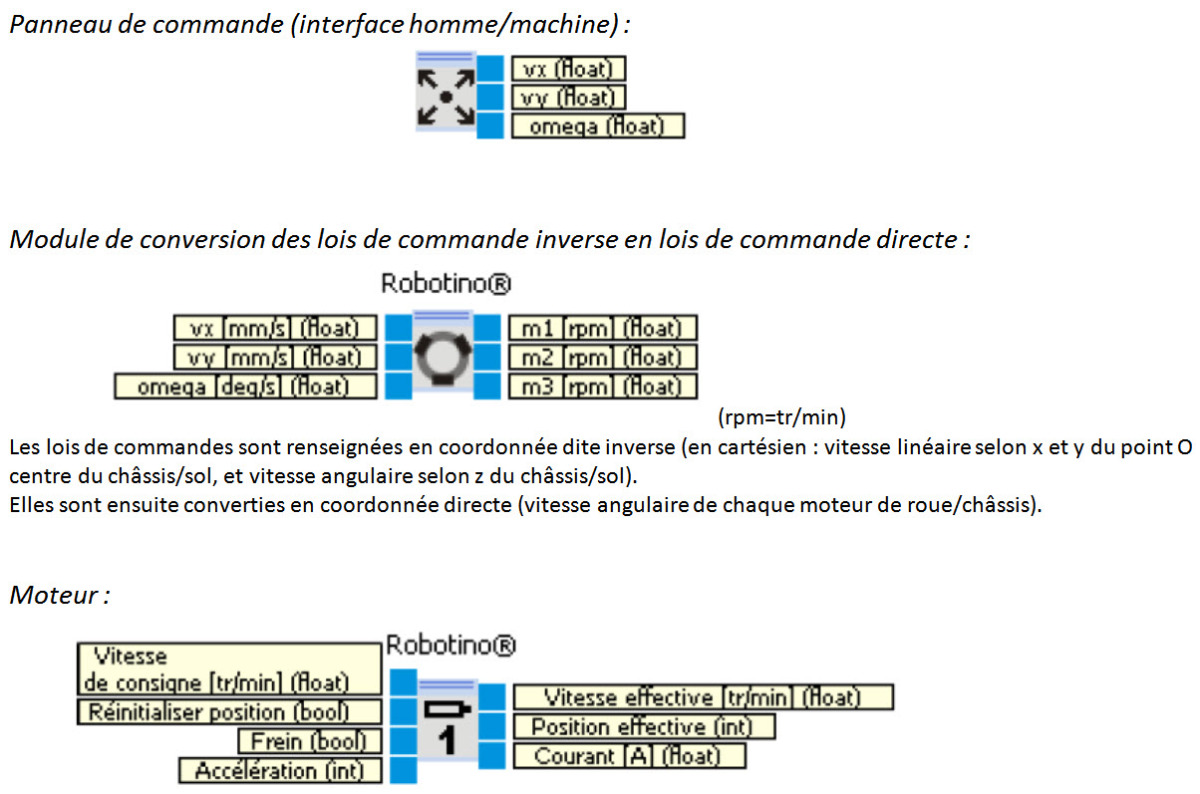
Commande directe ou inverse

Pour piloter le robotino, il faut commander les moteurs de chaque roue, c'est la commande directe (vitesse angulaire de chaque moteur de roue/châssis).
Il est possible à partir du logiciel de commander le robotino en inverse, c'est à dire avec les coordonnées cartésiennes (vitesse linéaire selon x et y du point O centre du châssis/sol, et vitesse angulaire selon z du châssis/sol).
Commande inverse
Télécharger puis ouvrir le programme ci-dessous permettant de commander le robotino à l'aide de coordonnée inverse.
Robotino_commande_inverse_zippé.zip
Cliquer sur Affichage /Afficher les valeurs des connexions.
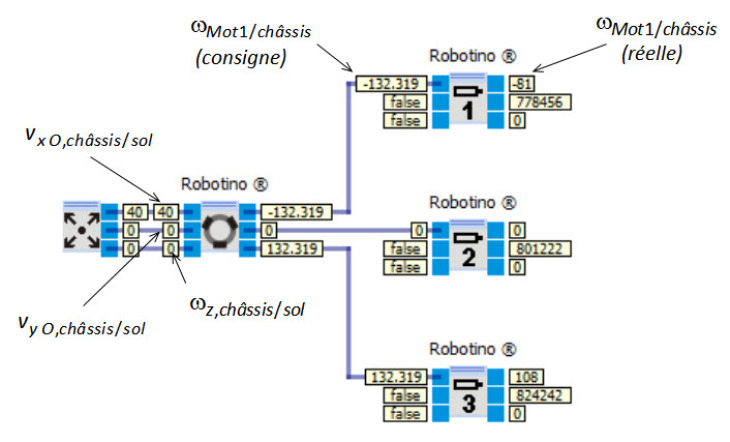
Ci-dessous les légendes des différents symboles.
Saisir l'adresse IP du robot dans le bandeau du logiciel.
Connecter le logiciel au robot ![]() .
.
Lancer l’exécution du programme ![]() .
.
Tester les commandes manuelles du robot en utilisant les touches du panneau de contrôle.
Repérer sur le logiciel, les valeurs et signes des vitesses de rotation des 3 moteurs :
- lors d'un mouvement d'avance de translation à trajectoire rectiligne du robotino ;
- lors d'un mouvement de rotation autour de l'axe (O,z) du robotino.
Commande directe
Réaliser le programme ci-dessous permettant de commander le robotino à l'aide de coordonnée directe.
Pour cela, chaque moteur sera inséré sur la feuille de travail à partir du menu « robotino/système moteur »
.
Les consignes de vitesses seront générées par des constantes à partir du menu « bibliothèque/générateur »
.
Cliquer sur les carrés bleus afin de relier les blocs.
Cliquer sur Affichage /Afficher les valeurs des connexions.
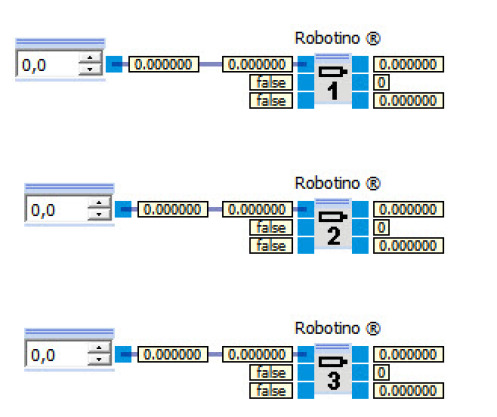
Ci-dessous les légendes des différents symboles.

Saisir l'adresse IP du robot dans le bandeau du logiciel.
Connecter le logiciel au robot ![]() .
.
Lancer l’exécution du programme ![]() .
.
Tester le pilotage.
Éteindre le robotino lorsque ce dernier n'est pas utilisé afin de conserver les batteries qui malheureusement se déchargent très rapidement.




