
Organisation structurelle de l'axe du poignet
Diagramme de blocs internes de l'axe du poignet
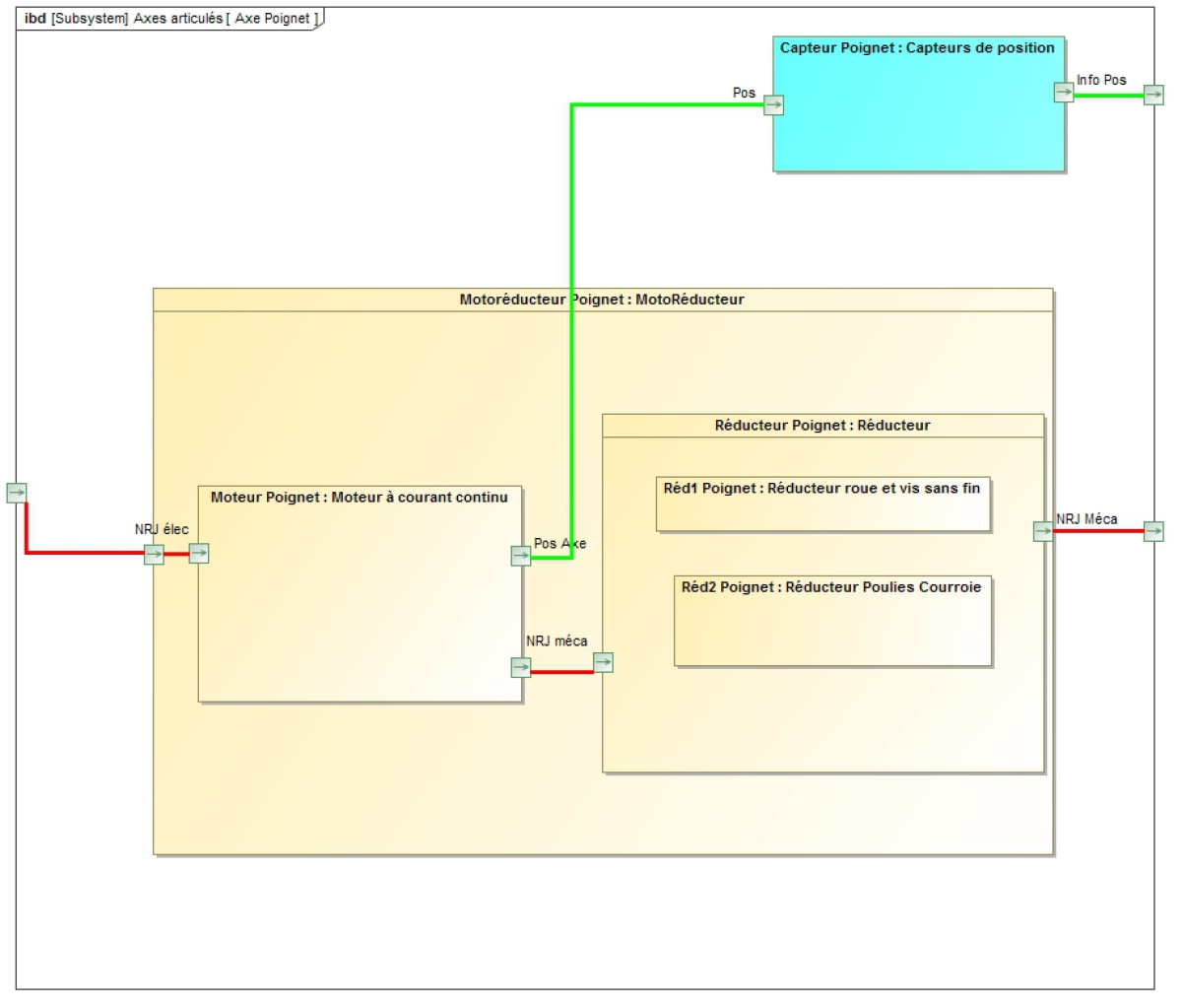
Cet axe comprend :
- un moteur à courant continu ;
- un accouplement (qui solidarise l'axe du moteur à l'axe du réducteur roue et vis sans fin) ;
- un premier réducteur roue et vis sans fin ;
- suivi d'un second réducteur poulie-courroie ;
- un codeur incrémental angulaire (ou roue codeuse) qui permet de mesurer la vitesse de rotation et la position angulaire de l'axe.
Regarder la vidéo ci-dessous présentant le fonctionnement d'un réducteur roue et vis sans fin :
Repérer tous les éléments ci-dessus sur l'axe du poignet du système réel.




