contenu
menu
navigation
pied de page
Attention, votre navigateur ne supporte pas le javascript ou celui-ci a été désactivé. Certaines fonctionnalités de ce module sont restreintes.
Robot Ericc 3
Mode :
Cours
Menu :
Mise en situation
Énoncé du besoin et des exigences du robot Ericc
Organisation structurelle du système présent dans le laboratoire
Organisation structurelle des axes de lacet, d'épaule et de coude
Organisation structurelle de l'axe du poignet
Organisation structurelle de l'axe de l'outil
Codeur incrémental (ou roue codeuse) et nécessité d'un capteur absolu supplémentaire
Organisation structurelle de l'ouverture et fermeture de la pince.
Coffret variateur électronique
Unité de commande et interface homme-machine
Diagramme de définition de blocs et diagrammes de blocs internes
Utilisation du logiciel de pilotage et d'analyse
Contenu :
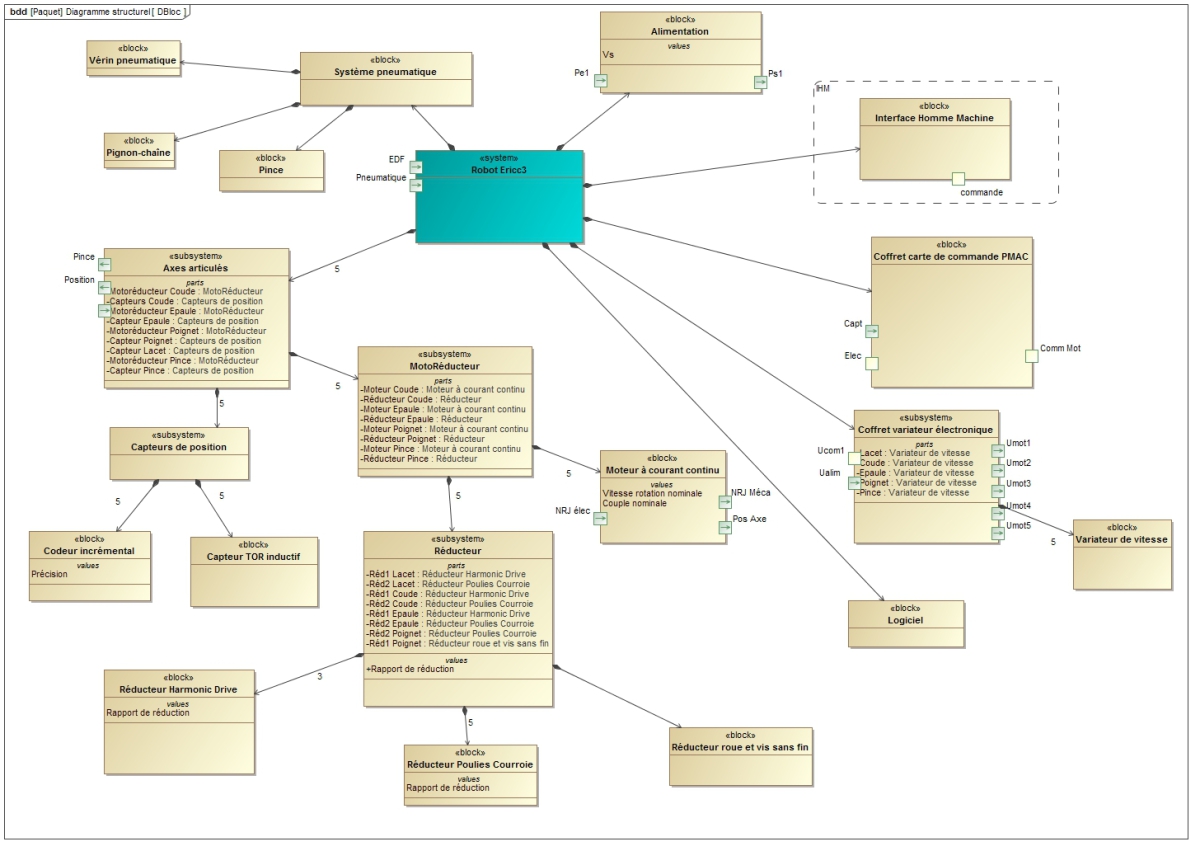
Diagramme de définition de blocs et diagrammes de blocs internes
Diagramme de définition de blocs
Diagramme de blocs internes
Navigation :
Précédent
|
Suivant
Accueil
|
Imprimer
|
|