Transmetteur : les réducteurs de vitesse
Réducteurs de vitesse de tangage de l'épaule et du roulis du coude
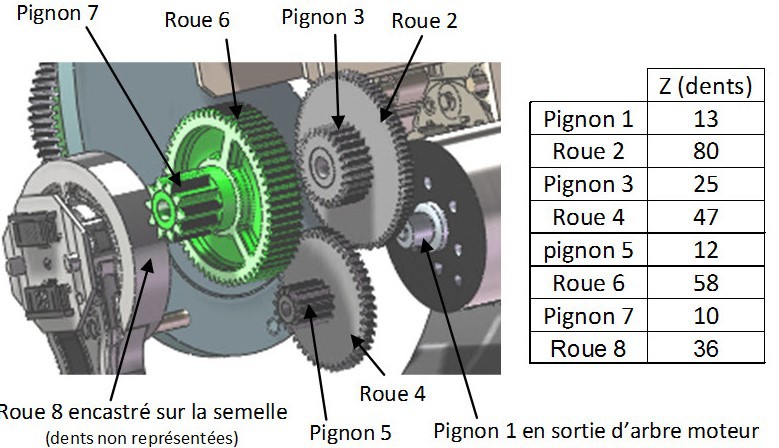
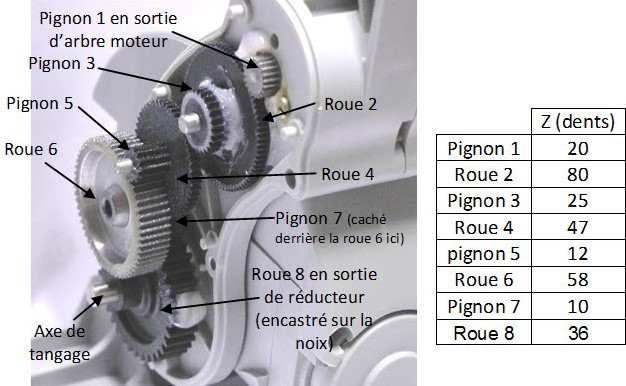
Les réducteurs de vitesse de tangage de l'épaule (ShoulderPitch) et du roulis du coude (ElbowRoll) sont différents :
- rapport de réduction du réducteur de vitesse ShoulderPitch : 150,27
- rapport de réduction du réducteur de vitesse ElbowRoll : 173,22
Réducteur de tangage de la cheville
Réducteur de roulis de la cheville