Prendre en compte la saturation de la tension d'alimentation du moteur
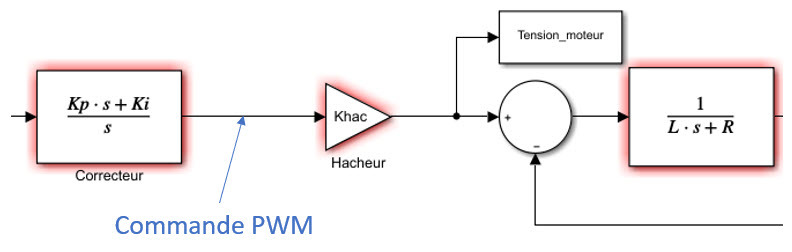
Si après calcul (c'est à dire après le correcteur), la commande PWM est très importante, elle entraînera dans le modèle, une tension moteur très importante également.
Or dans le système réel, la tension moteur ne pourra jamais dépassée ce qu'est capable de fournir le transformateur.
Ainsi, dans l’algorithme, on limite la commande PWM par un maximum à ne pas dépasser. On parle de saturation de la commande, telle que PWMsat=Umoteurmax/Khacheur
– Ouvrir la librairie « Simulink » ![]() .
.
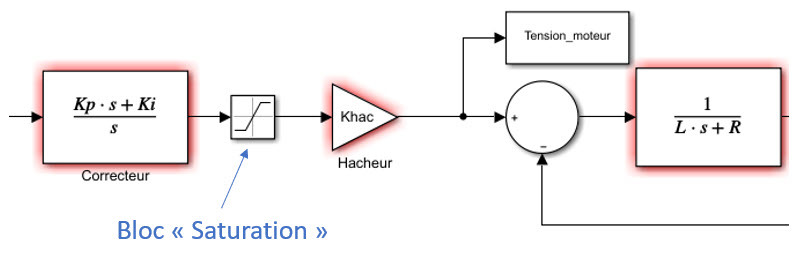
– Puis, sélectionner l'élément « Saturation »  situé dans la palette « Simulink / Discontinuities », et le glisser dans la fenêtre Modèle.
situé dans la palette « Simulink / Discontinuities », et le glisser dans la fenêtre Modèle.
– Le placer avant le préactionneur (exemple ci-dessous, devant le hacheur).
– Double cliquer dessus le bloc, afin de le renseigner (en indiquant les valeurs max et min). Par exemple :

– Enfin, dans le script : saisir PWMsat=Umoteurmax/Khacheur
Ainsi :
- si la commande avant le bloc saturation < PWMsat, alors la commande après le bloc saturation = la commande avant le bloc saturation ;
- si la commande avant le bloc saturation ≥ PWMsat, alors la commande après le bloc saturation = PWMsat ;