Structure possible à piloter (BO/BF) et schéma-blocs associé
Sur ce système, il est possible de piloter 4 structures :
Essai possible | Structure à piloter | Notation dans le logiciel | Entrée à renseigner | Schéma-blocs associé (cliquer sur le schéma pour le visualiser en grand) |
|---|---|---|---|---|
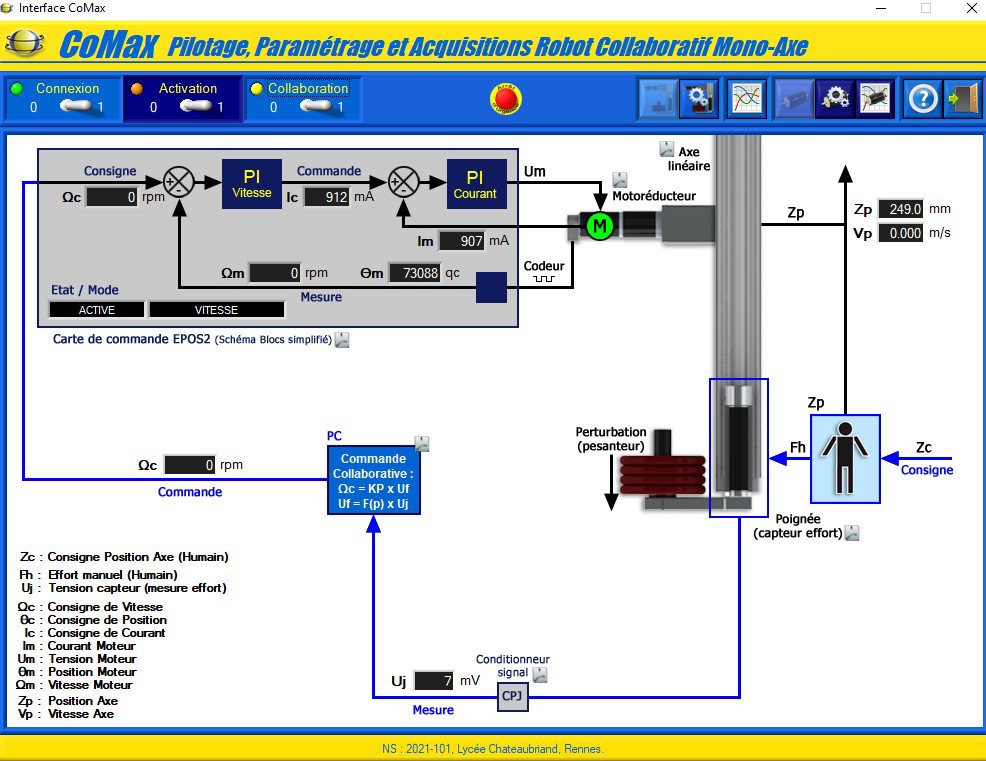
Essai en boucle fermée (BF) | Avec asservissements en vitesse et courant + prise en compte de la boucle collaborative (prise en compte du retour des capteurs, et des corrections apportées par l'unité de commande au niveau des boucles de courant et de vitesse) | Collaboration | Consigne de position à l'aide de la poignée |
|
Avec asservissements en position et courant (prise en compte du retour des capteurs, et des corrections apportées par l'unité de commande au niveau des boucles de courant et de position) | Profil de position ou Position | Consigne de position en mm à l'entrée de la boucle de position |
| |
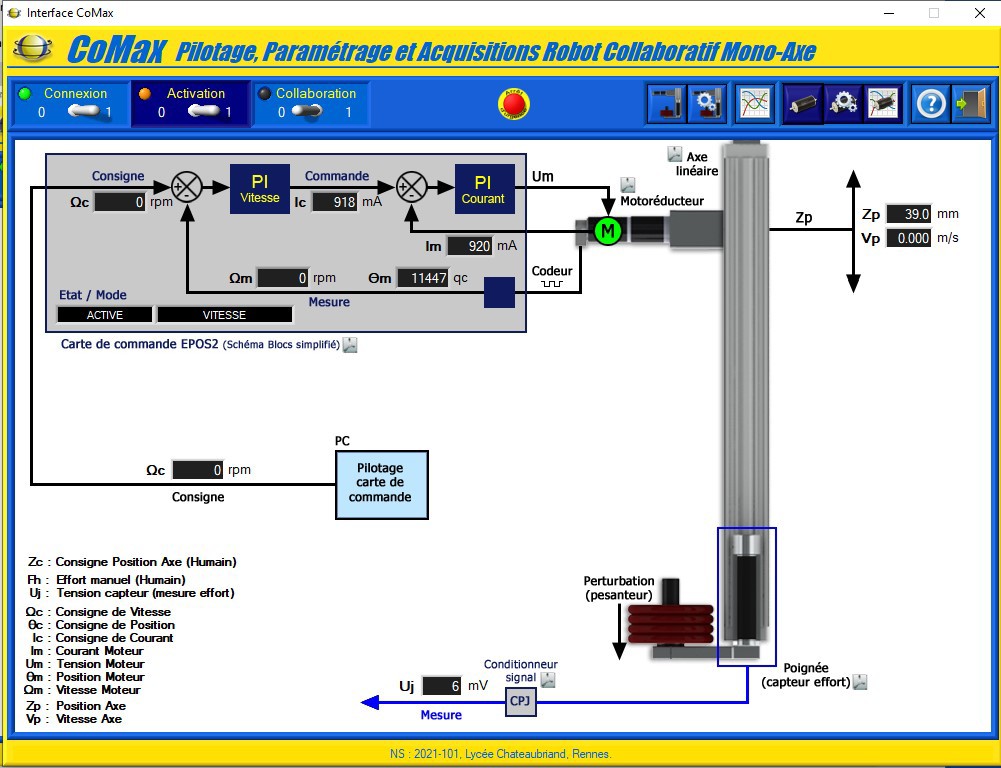
Avec asservissements en vitesse et courant (prise en compte du retour des capteurs, et des corrections apportées par l'unité de commande au niveau des boucles de courant et de vitesse) | Vitesse | Consigne de vitesse en rpm (tr/min) à l'entrée de la boucle de vitesse |
| |
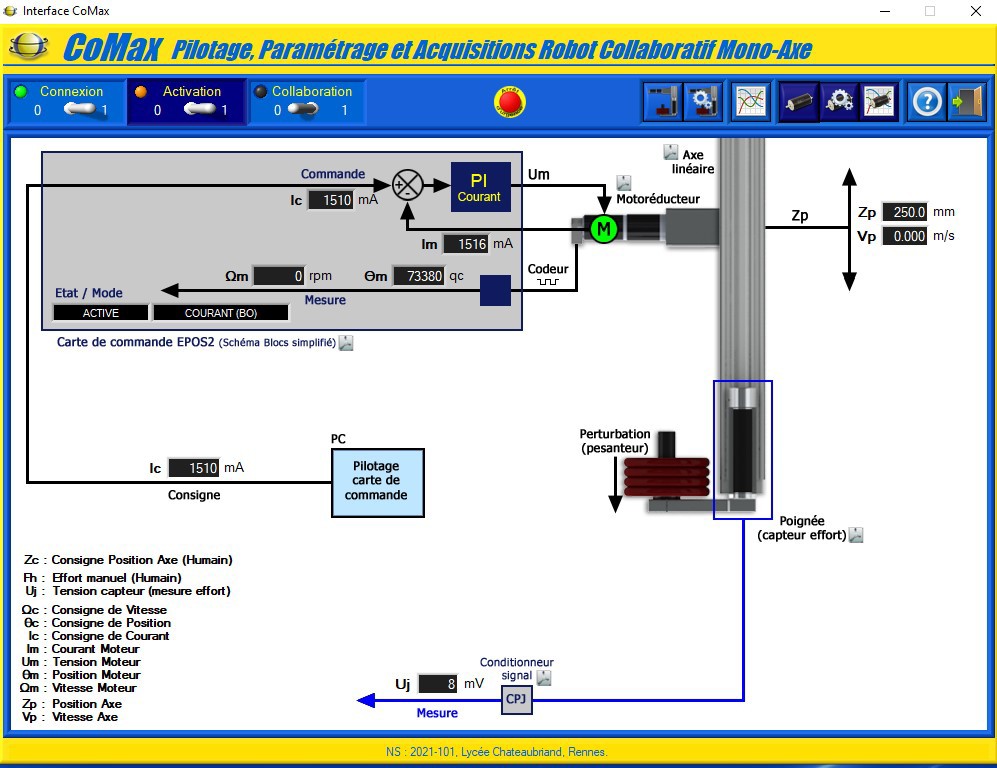
Essai en boucle ouverte (BO) (boucles de position et vitesse ouvertes) | Boucle ouverte avec tout de même asservissement en courant (prise en compte du retour du capteur, et de la correction apportée par l'unité de commande uniquement au niveau de la boucle de courant) | Courant (BO) | Consigne de courant en mA à l'entrée de la boucle de courant |
|