
Mise en situation
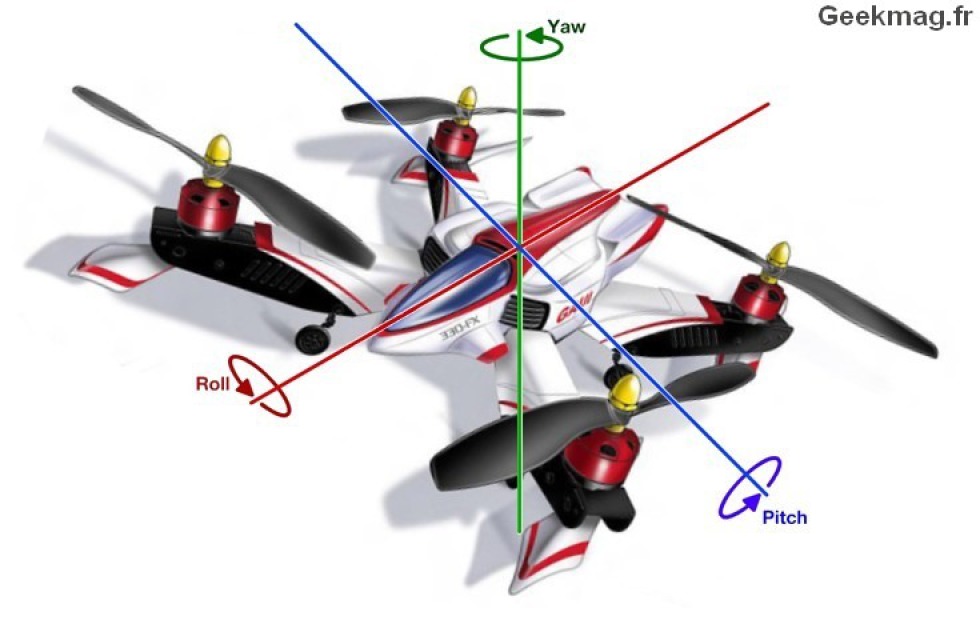
Stabilisation en tangage
Pour pouvoir réaliser un vol en translation, un drone doit pouvoir être placé dans une position inclinée par rapport à l'horizontale.
C'est l'étude du passage à cette position inclinée et du maintien de cette position inclinée qui est étudié grâce au système Drone D2C. Le problème étudié ici n'est donc pas le problème de la stabilisation verticale (altitude) mais le problème de la stabilisation angulaire (« tangage » ou « pitch ») obtenue grâce à la mise en place de boucles d'asservissement (vitesse et position) et l'utilisation de correcteurs dans le micro-contrôleur.
La maquette Drone Didactique Contrôlé (D2C) met en œuvre les technologies qui constituent les drones. Il permet de tester les solutions technologiques de commande d'un système asservi dont les exigences en terme de performances sont élevées.
Pilotages en position et en vitesse
Pour pouvoir réaliser un vol en translation, le drone doit pouvoir être placé dans une position inclinée. Pour le pilote, qui génère les consignes de vol grâce aux joysticks de sa radiocommande, on peut différencier deux modes de pilotage :
• Le pilotage en mode "position" ; c'est à dire qu'une certaine inclinaison du joystick (manche) correspond à une inclinaison du drone ;
• Le pilotage en mode "vitesse" ; c'est à dire qu'une certaine inclinaison du joystick (manche) commande une vitesse d'inclinaison du drone.




