Affichage personnalisé
Affichage personnalisé
Si besoin, il est possible de tracer des fonctions particulières :
– une grandeur en fonction d'une autre grandeur (et non pas en fonction du temps), exemple : qpompe=f(ωmoteur)
– un rapport entre deux grandeurs en fonction du temps, exemple : qpompe/ωmoteur=f(t)
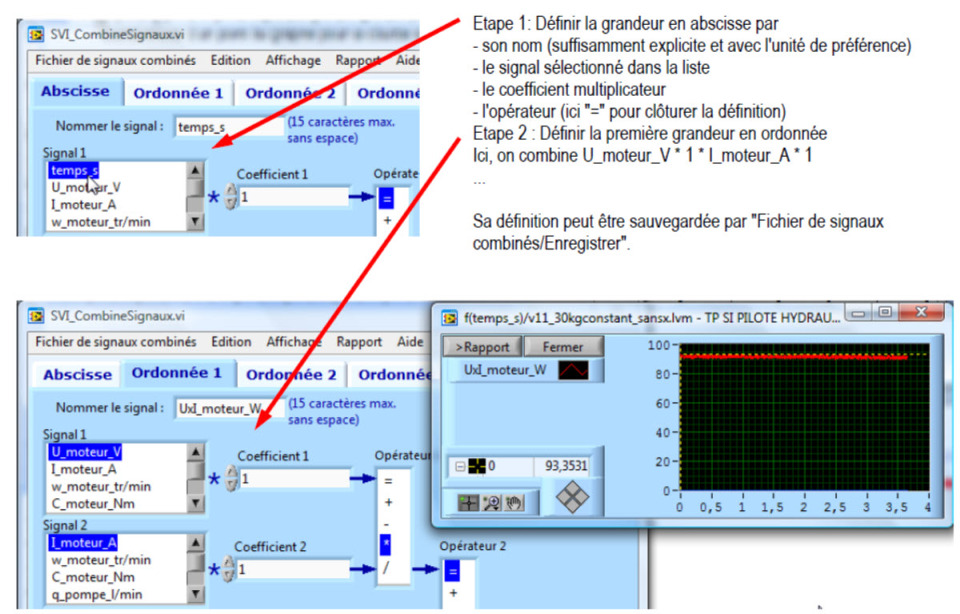
– une combinaison de grandeurs, exemple tracé de la puissance électrique consommée par le moteur : Pélec=f(t) en traçant umoteur*imoteur=f(t)
Exemple : pour retrouver la courbe de puissance électrique du moteur en fonction du temps, on peut construire le produit de umoteu et de imoteur comme illustré ci-après.
Dans le menu "Outils/Combiner les signaux" :
Obtention d'une valeur particulière
Chaque graphique est doté de fonctions de cadrage, de positionnement et d'identification de valeurs à l'aide d'un curseur.


Grandeurs affichées proposées
NB : toute variable désignée par "barre" signifie le "safran (bras de mèche)"
Seules les grandeurs ci-dessous sont mesurées via les capteurs :
U_moteur : tension moteur
I_moteur : intensité moteur
w_moteur=w_pompe : vitesse angulaire du moteur et de la pompe
q_pompe=q_vérin : débit volumique à la sortie de la pompe
p_pompe=p_vérin : pression à la sortie de la pompe
x_vérin : position linéaire de la tige du vérin/corps du vérin
a_barre : alpha, position angulaire du safran/coque
Les autres grandeurs sont déduites via les grandeurs mesurées ci-dessus ou selon la valeur de la masse levée saisie M :
C_moteur=couple moteur
F_vérin=Résultante de l'action de la tige du vérin sur le safran (exemple : F_vérin=0N si aucune masse n'est accrochée ou plutôt si aucune masse n'a été saisie).
V_vérin=vitesse linéaire de la tige du vérin/corps du vérin
C_barre=Moment en O de l'action de la tige du vérin sur le safran (en fait F_vérin * bras de levier)
w_barre=vitesse angulaire du safran/coque
xth_vérin : position linéaire de la tige du vérin/corps du vérin, déterminée à partir de a_barre et de la loi e/s géométrique du 3 barres. NB : Il ne devrait pas exister de différence significative entre "x_vérin" et "xth_vérin". Néanmoins il s'agit de deux grandeurs issues de mesures distinctes dépendant de la précision des capteurs, de leur étalonnage, du traitement effectué sur le signal notamment pour la conversion fréquence-tension, de la qualité du dispositif d'acquisition (précision, échantillonnage), du traitement numérique des signaux échantillonnés, des erreurs dimensionnelles sur les cotes a, b, R.
Vth_vérin : vitesse linéaire de la tige du vérin/corps du vérin, déterminée à partir de w_barre et de la loi e/s cinématique du 3 barres.
P_élec=U_moteur*I_moteur
P_méca=C_moteur*w_moteur
P_hydrau=Q_pompe*p_pompe
P_vérin=F_vérin*V_vérin
P_barre=C_barre*w_barre
NB : P_vérin=P_barre
r_moteur=P_méca/P_élec
r_pompe=P_hydrau/P_méca
r_vérin=P_barre/P_hydrau
r_global=r_moteur*r_pompe*r_vérin (produit des rendements)