Choix de la structure à piloter (BO/BF) et définition du correcteur et de l'entrée
Choix de la structure à piloter
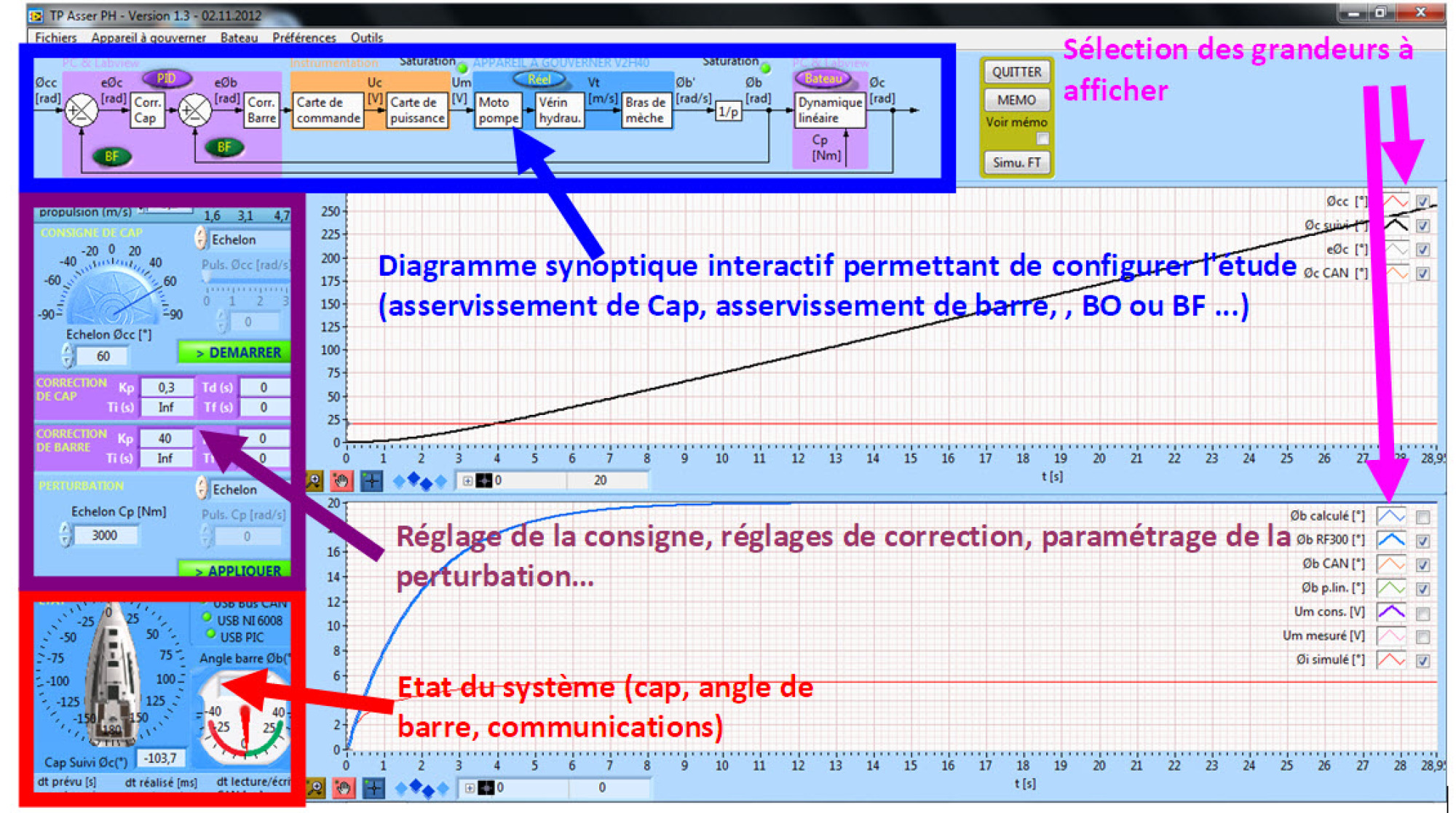
Sur ce système, il est possible de piloter 4 structures (2 AVEC asservissement ou 2 SANS asservissement) :
Essai possible | Structure à piloter | Entrée à renseigner |
|---|---|---|
Essai en boucle fermée (BF) | Avec asservissement en position de la barre (bras de mèche) (prise en compte du retour capteur de position de la barre, et de la correction apportée par l'unité de commande) | Consigne de position de la barre en deg à l'entrée du du correcteur de cap |
Avec asservissement en position du cap (prise en compte du retour capteur de position du cap, et de la correction apportée par l'unité de commande) | Consigne de position du cap en deg à l'entrée | |
Essai en boucle ouverte (BO) | Sans asservissement en position de la barre (bras de mèche) (pas de retour capteur envoyé à l'unité de commande) | Consigne de position de la barre en deg à l'entrée du du correcteur de cap |
Sans asservissement en position du cap (pas de retour capteur envoyé à l'unité de commande) | Consigne de position du cap en deg à l'entrée |
Il est également possible de combiner BF ou BO de la barre, avec BF ou BO du cap.
Pour choisir la structure à piloter, cliquer sur les boutons ![]() ,
, ![]() et
et ![]() .
.
Exemple pour un essai en boucle fermée avec uniquement un asservissement en position de la barre :
- Sélectionner le mode « Sans (Étude de l'appareil à gouverner seul) » à l'aide du bouton ![]() et de la fenêtre de dialogue associé,
et de la fenêtre de dialogue associé,
- Choisir un fonctionnement en boucle fermée grâce au bouton ![]() .
.
Le synoptique a alors l'allure suivante :

Définition des correcteurs (uniquement pour une structure avec asservissement)
La zone "Correction de cap" et "Correction de barre" (image ci-dessous) permet de définir les correcteurs lorsqu'ils sont utilisés lors de pilotage en BF.
Ils ont pour fonction de transfert \(C(p)= K_p\left( \frac{1+T_i p}{T_i p} \right) \left( \frac{1+T_d p}{1+T_f p} \right)\) avec :
-\(K_p\) gain proportionnel ;
-\(T_i\) constante de temps de l'intégral ;
-\(T_d\) et\(T_f\) constantes de temps du dérivé.
Le réglage de ces correcteurs (valeurs de \(K_p , T_i , T_d \)et\(T_f\)) doit être renseigné selon les les valeurs données dans le TP.
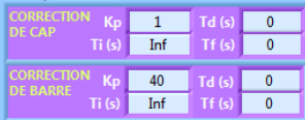
En revanche, si la structure choisie est uniquement un asservissement en position de la barre (comme le schéma-bloc ci-dessus), il est nécessaire de régler le correcteur de cap (qui ne doit pas servir dans ce cas) à \(C(p)= 1\) , c'est à dire \(K_p=1 \), \(T_i=Inf \)(infini) , \(T_d=T_f=0\) .
Définition de la consigne

Voir tableau en haut de la page afin de connaître la grandeur en entrée de l'essai.
- Choisir une consigne « Echelon »
NB : même si la structure choisie est uniquement un asservissement en position de la barre, la consigne est nommée dans le logiciel consigne cap au lieu de consigne barre.
- Ajuster la valeur de l'amplitude de l'échelon.
Rappel : la barre (bras de mèche) a une amplitude angulaire de ± 37° par rapport à cette position médiane. Ne pas dépasser ces valeurs !