Branchement et lancement du logiciel

La mise en œuvre de l'axe autonome se fait en suivant les différentes étapes ci-dessous. Si ce n'est pas déjà fait :
• brancher le connecteur DB9 du vérin sur le shield moteur = carte supérieure ;
• brancher l'alimentation fournie sur le connecteur jack du shield moteur = carte supérieure (et non pas sur le connecteur jack de la carte Arduino Due = carte inférieure), puis l'autre extrémité sur une prise 230V AC;
• brancher le câble micro USB fourni, sur le connecteur micro USB de la carte Arduino Due = carte inférieure (qui se trouve juste à côté du connecteur jack), puis l'autre extrémité sur un port USB de l'ordinateur ;
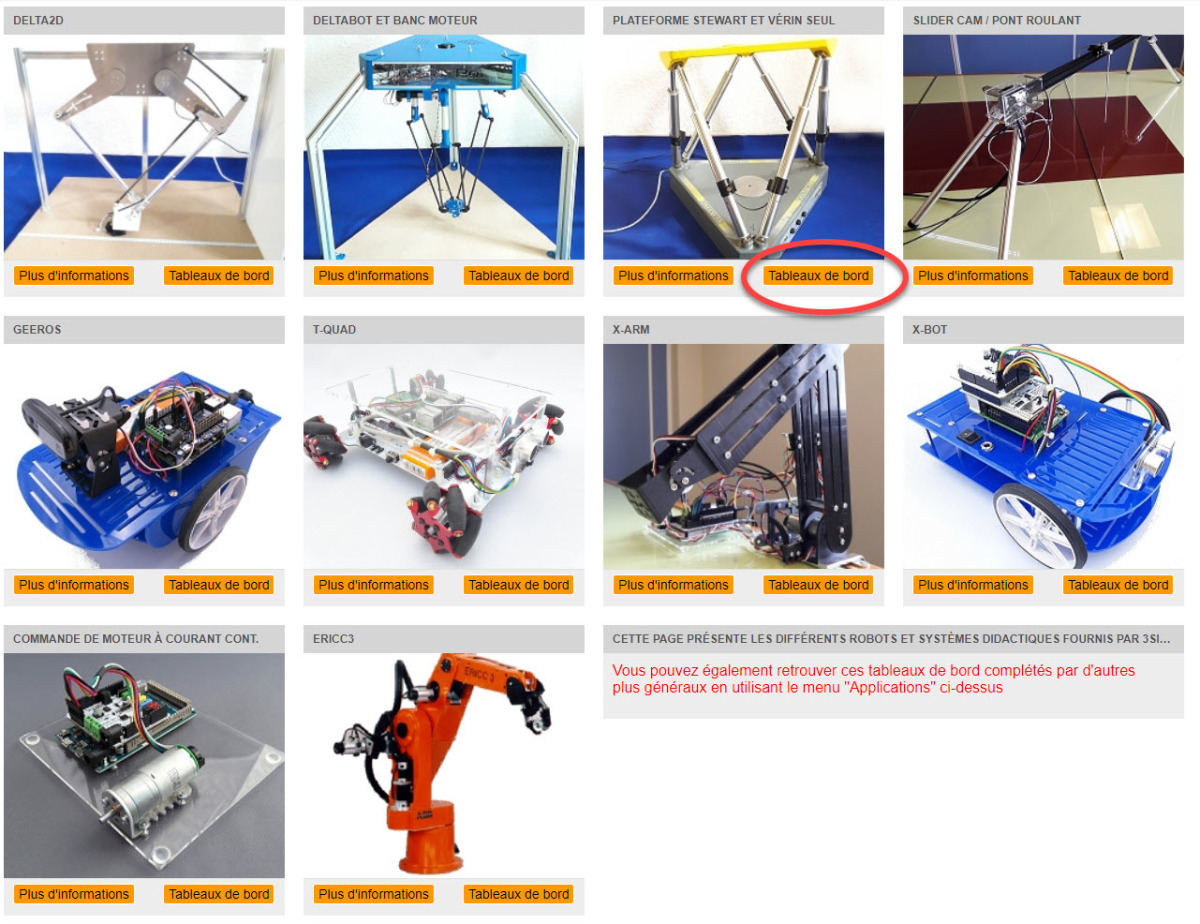
• lancer le logiciel MyViz (à partir du dossier maquette sur le bureau du PC) ;
• sélectionner le système "Plate-forme stewart et vérin seul" en cliquant sur "Tableaux de bord" :
• sélectionner le port série de la carte de commande Arduino dans Paramètre / Port série par défaut / COM... Arduino (généralement le port avec le numéro le plus élevé) :
• si besoin, choisir un thème « clair » ou « sombre » pour l'application, en fonction de vos préférences.