
Choix de la structure à piloter (BO/BF) et définition des correcteurs et de l'entrée
Choix de la structure à piloter
Il est possible de mettre en place 3 asservissements imbriqués :
- asservissement en position avec son correcteur de position et son capteur de position (potentiomètre rotatif) ;
- asservissement en vitesse avec son correcteur de vitesse et son capteur de vitesse (génératrice tachymétrique) ;
- asservissement en courant avec son correcteur de courant et son capteur de courant.
Ainsi, en combinant ces asservissements, il est possible de piloter 4 structures en BF et 1 structure en BO sur ce système :
Essai possible | Structure à piloter | Entrée à renseigner |
|---|---|---|
Essai en boucle fermée (BF) | Avec asservissement en position seul | Consigne de position linéaire de la tige du vérin |
Avec asservissements en position et en vitesse | ||
Avec asservissements en position et en courant | ||
Avec asservissements en position, en vitesse et en courant | ||
Essai en boucle ouverte (BO) | Sans asservissement (pas de retour capteur envoyé à l'unité de commande) | Tension d'alimentation du moteur |
Pour des essais en BO, ouvrir l'interface de pilotage "Commande en tension" (voir image ci-dessous).
Pour des essais en BF, ouvrir l'interface de pilotage "Asservissement en position". Ensuite, selon la structure à piloter, désactiver si besoin l'asservissement en vitesse et/ou en courant, en sélectionnant "aucun" dans "Type de correcteur" (voir seconde image ci-dessous).


Définition des correcteurs (uniquement pour une structure à piloter en BF)
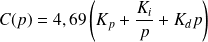
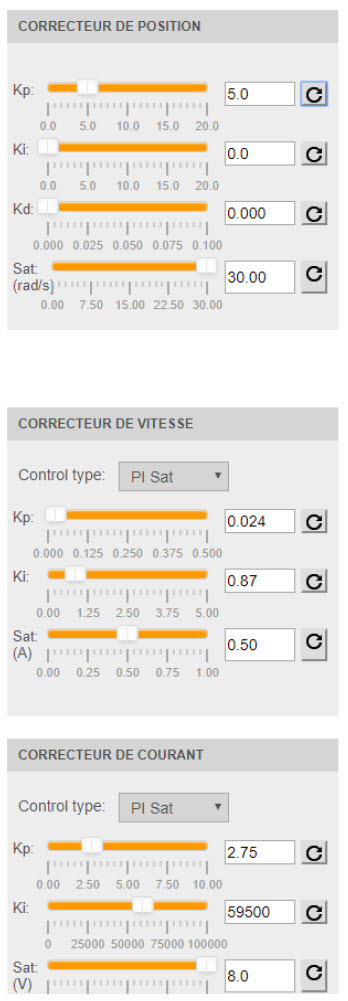 | Les zones "correcteurs" permettent également de les définir lorsqu'ils sont utilisés lors de pilotage en BF. Pour chaque axe, le correcteur de position a pour fonction de transfert
-
-
-
Le réglage de chaque correcteur (valeurs de
NB : il est possible également de régler la saturation (valeur maximum envoyée) en sortie de correcteur. Par défaut, régler à la valeur max. |






Définition de l'entrée
Voir tableau en haut de la page afin de connaître la grandeur en entrée de l'essai.
Puis pour définir par exemple en entrée, le signal ci-dessous :
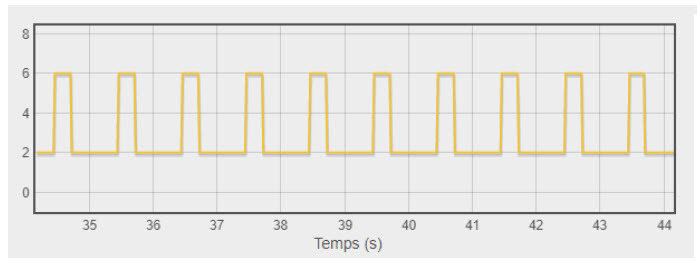
Alors sélectionner :
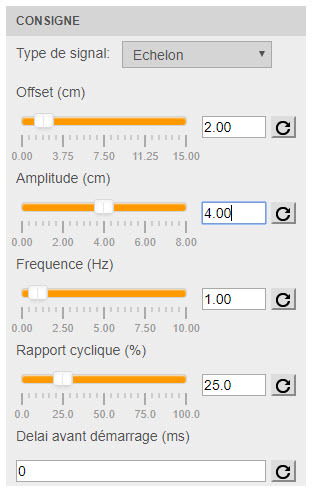 | • type de signal : choisir échelon (suite de plusieurs échelons, comme l'image ci-dessus) ; • offset : le niveau bas du signal est égal à l'offset (qui définit en fait un décalage par rapport à 0). Sur le signal ci-dessus, le niveau bas est 2 ; • amplitude : le niveau haut du signal est égal à l'amplitude + l'offset ; • fréquence (Hz) = inverse de la période (s) ; • rapport cyclique : largeur du niveau haut du signal, définie en pourcentage de la période (régler à 100% pour imposer un seul échelon) (régler à 50% pour imposer une suite d'échelons) ; • délai de démarrage : permet de définir un délai entre le démarrage d'une acquisition et le démarrage du signal ; |




