Configuration de l'interface de programmation
Connexion à NAO
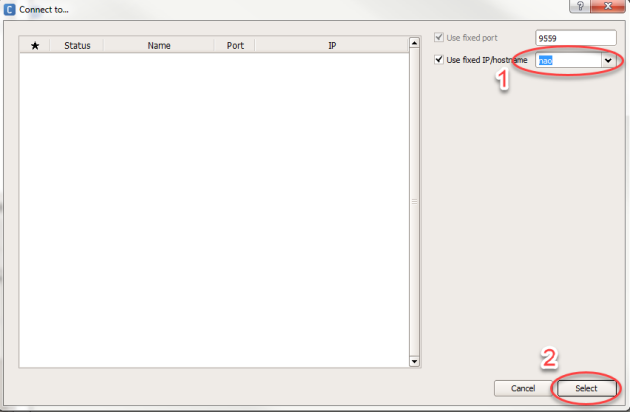
Se connecter au robot réel en cliquant sur ![]() .
.
Saisir nao dans la boite de dialogue hostname, puis cliquer sur ‘Select' (voir image ci-dessous).
Attention : ne pas se connecter au robot virtuel.
Réglage de l'interface de programmation
L'interface graphique du logiciel est partagée en trois zones.
– la zone centrale, qui permet de réaliser le programme à l'aide d'un langage graphique ;
– les zones à gauche et à droite qui affichent des fenêtres utiles à la réalisation du programme.

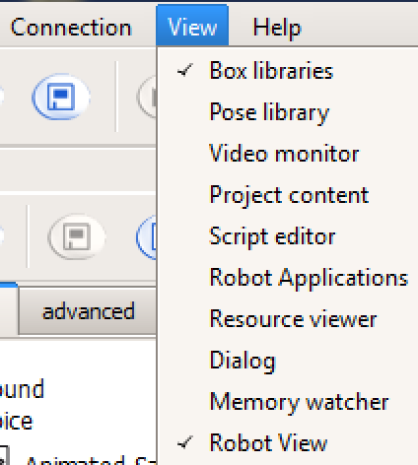
A l'aide du menu ‘View', sélectionner uniquement les fenêtres :
– « Box librairies » (boîtes pré-programmées permettant de réaliser des fonctions élémentaires comme "dire bonjour", "se lever", "récupérer des informations des capteurs"...). Cette fenêtre se positionne à gauche par défaut (voir image ci-dessus) ;
– « Robot view » (prévisualisation de la posture du modèle virtuel). Cette fenêtre se positionne à droite par défaut (voir image ci-dessus). Les informations capteurs de NAO sont transmises en temps réel, du robot à l'interface de programmation, permettant ainsi une mise à jour instantanée de la visualisation du modèle virtuel.