Programmation
Boîte initiale "Set Stiffness" et boîte finale "Rest" à définir pour tout programme
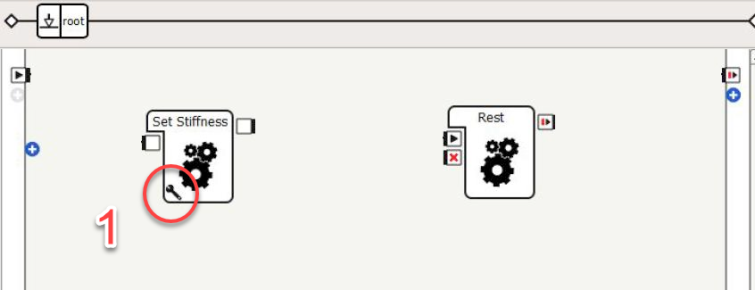

BOITE INITIALE rigidité "Set Stiffness" : avant d'exécuter un mouvement, limiter le courant max admissible dans les moteurs lors du mouvement, à l'aide de la boîte rigidité "Set Stiffness" (Box librairies advanced/Motions). Faire glisser cette boîte sur la zone de travail. Cliquer sur la clé à molette (1 sur l'image ci-dessus) de cette boîte afin de choisir ses paramètres. Imposer une rigidité de 70% pour TOUS les moteurs (2 sur l'image ci-contre). La durée (duration) de 1s correspond au temps de passage de l'ancienne à la nouvelle valeur.
BOITE FINALE repos "Rest" : en aval du mouvement, afin de ne pas engendrer une surchauffe des moteurs, relâcher toutes les articulations à l'aide de la boîte repos "Rest" (Box librairies standard/Motions). Faire glisser cette boîte sur la zone de travail.
1er programme : faire exécuter à NAO, le geste bonjour avec la main
Pour cela, faire glisser la boîte "Hello" (Box librairies standard/Motions/Animations) sur la zone de travail.
Pour créer la séquence, relier l'entrée du programme (flèche à gauche en haut de la zone de travail) à l'entrée de la première boîte (flèche à gauche de la boîte).
Relier ensuite la sortie de la dernière boîte (flèche de droite) à la sortie du programme (flèche à droite en haut de la zone de travail).

Pour exécuter cet exemple de programme, cliquer sur ![]() .
.
L'exécution du programme peut être stoppée à tout moment en cliquant sur ![]() .
.
2nd programme : piloter la main gauche
LIBRAIRIE NÉCESSAIRE :
Il est nécessaire au préalable de télécharger la librairie : Chateaubriand_ERM.2.1.3.cbl
Dans la fenêtre "Box librairies", ouvrir ce fichier préalablement téléchargé. Si ce fichier n'est pas visible dans son dossier, modifier le type dans la zone "Files of type" et sélectionner CBL.
La main gauche peut être pilotée de 2 manières différentes :
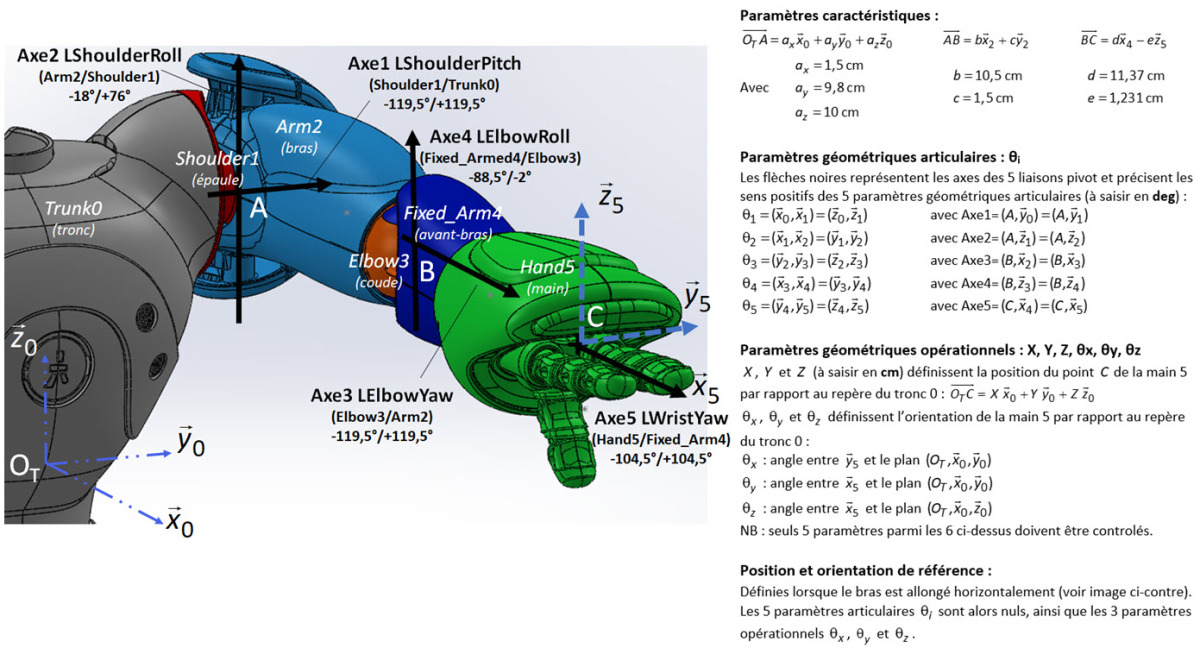
soit en pilotant la position angulaire de chaque axe, à l'aide des 5 paramètres géométriques articulaires : \({\theta}_i\) (voir figure ci-dessus). Les débattements limites de ces angles sont précisés sur la figure ci-dessus par les valeurs positives et négatives ;
soit en pilotant la position du point C et l'orientation de la main / trunk (tronc 0), à l'aide de 5 paramètres géométriques opérationnels parmi les 6 proposés : \(X\), \(Y\), \(Z\), \({\theta}_x\), \({\theta}_y\) et \({\theta}_z\),
NB : le pilotage à l'aide des paramètres géométriques opérationnels est possible, car dans la carte de commande, les relations entre les paramètres géométriques articulaires et les paramètres géométriques opérationnels ont été saisies. Ainsi, les consignes opérationnelles sont immédiatement traduites en consignes articulaires.
EXEMPLE 1 : Pilotage à l'aide des paramètres géométriques articulaires
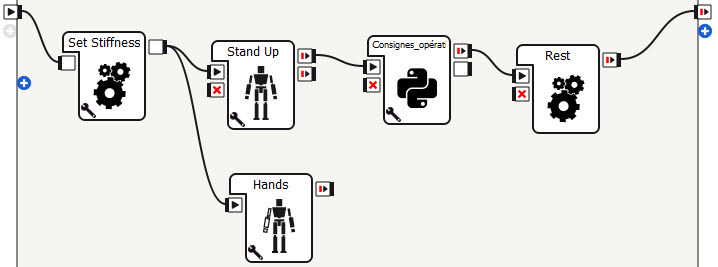
A l'aide de la librairie Chateaubriand_ERM, utiliser les boîtes "Set Stiffness", "Stand Up" (se lever), "Consignes_articulaires" et "Rest" afin de réaliser le programme ci-dessous.

Régler la rigidité des moteurs à 70%.
Cliquer sur la clé à molette de la boîte "Consignes_articulaires" afin de saisir les consignes.

1/ Indiquer la durée dT de l'essai. Exemple : dT=10 s.
2/ Indiquer dans le tableau (voir image ci-contre), les valeurs des consignes articulaires : LShoulerPitch=-90+10*t, LshoulderRoll=10, LElbowYaw=25, LElbowRoll=-45, LWristYaw=-90 correspondant à un mouvement de rotation d'axe (A,y0).
NB1 : LShoulerPitch=-90+10*t signifie que la consigne LShoulerPitch variera de -90 à +10° au cours du temps (si t varie de 0 à dT=10 s).
NB2 : Attention : les axes ont des débattements articulaires limités (voir figure en haut de page).
3/ Avant de lancer un essai, imaginer toujours la position que la main gauche va prendre...
4/ Cliquer sur le bouton OK.
5/ Puis exécuter le programme.
Autres essais à effectuer plusieurs fois :
- piloter la main gauche en faisant varier uniquement les valeurs d'un seul paramètre articulaire, afin de bien comprendre le sens et le 0 de chaque paramètre articulaire ;
- puis piloter la main gauche pour qu'elle ait un mouvement de translation à trajectoire rectiligne vertical (peu importe l'amplitude du mouvement, et peu importe sa position dans le plan horizontal). Ne pas passer plus de 5 min... et demander la solution au professeur.
NB : il est possible d'utiliser les fonctions cos, sin, tan, pi, abs, sqrt (racine carrée), sqr (carré), etc...
EXEMPLE 2 : Pilotage à l'aide des paramètres géométriques opérationnels
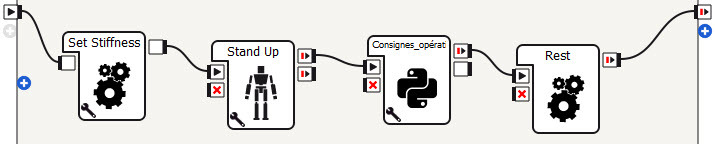
A l'aide de la librairie Chateaubriand_ERM, utiliser les boîtes "Set Stiffness", "Stand Up" (se lever), "Consignes_opérationnelles" et "Rest" afin de réaliser le programme ci-dessous.
Régler la rigidité des moteurs à 70%.
Cliquer sur la clé à molette de la boîte "Consignes_opérationnelles" afin de saisir les consignes.

1/ Indiquer la durée dT de l'essai. Exemple : dT=10 s.
2/ Indiquer dans le tableau (voir image ci-contre), les valeurs des consignes opérationnelles : \(X=13\) et \(Y=0\), \(Z=5+5*sin(2*pi/dT*t)\), \(ThetaX=0\) et \(ThetaY=0\) correspondant à un mouvement de translation à trajectoire rectiligne verticale.
NB1 : "NC" signifie non contrôlé (il faut nécessairement au moins un paramètre sur les 6 non contrôlé).
NB2 : \(Z=5+5*sin(2*pi/dT*t)\) signifie que la consigne Z variera de 0 à 10 mm au cours du temps (si t varie de 0 à dT=10 s).
NB3 : Attention : les débattements articulaires limités des \({\theta}_i\) entraînent des débattements opérationnels limités.
3/ Avant de lancer un essai, imaginer toujours la position que la main gauche va prendre...
4/ Cliquer sur le bouton OK.
5/ Puis exécuter le programme.
Autres essais à effectuer plusieurs fois :
- piloter la main gauche en faisant varier uniquement les valeurs d'un seul paramètre opérationnel, afin de bien comprendre le sens et le 0 de chaque paramètre opérationnel ;
- puis piloter la main gauche pour qu'elle ait un mouvement de rotation dans le plan horizontal (peu importe l'amplitude du mouvement) ;
- puis piloter la main gauche pour qu'elle ait un mouvement de translation à trajectoire circulaire dans le plan horizontal (peu importe l'amplitude du mouvement). Ne pas passer plus de 5 min... et demander la solution au professeur.
NB : il est possible d'utiliser les fonctions cos, sin, tan, pi, abs, sqrt (racine carrée), sqr (carré), etc...
EXEMPLE 3
Pour serrer une pièce entre les doigts de NAO, utiliser la boîte "Hands" en parallèle des autres mouvements (afin que le serrage se fasse du début à la fin de l'essai).