Choix des conditions de l'essai
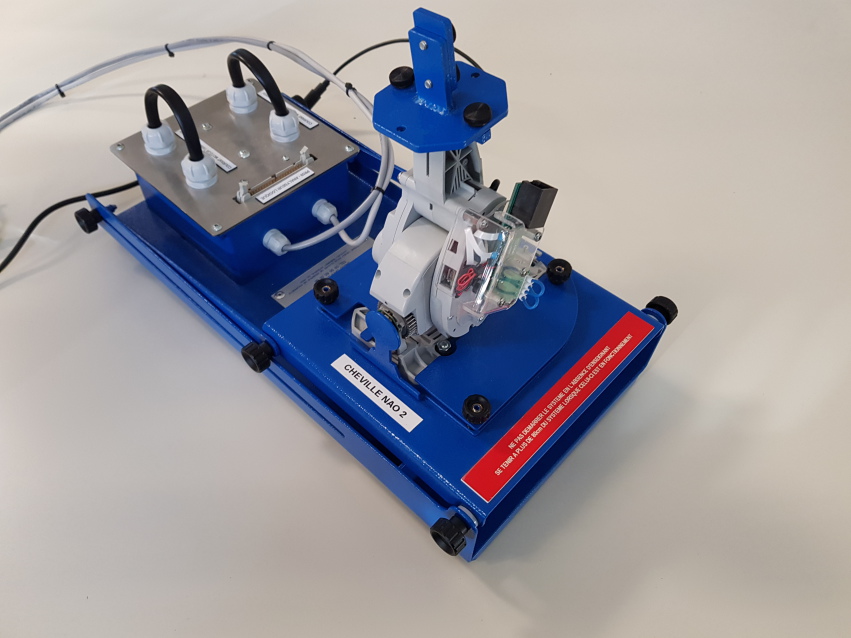
Il est possible au lieu de piloter le robot NAO (26 axes), de piloter uniquement une cheville autonome (2 axes).
Le pilotage de cette cheville autonome, montée sur un support spécifique, permet d'étudier le comportement de ses 2 axes.
Choix des conditions de l'essai
Selon le sujet de TP, positionner le tibia dans un plan vertical, ou dans un plan horizontal, ou à un angle donné :
