Affichage personnalisé
Si besoin, il est possible de tracer des fonctions particulières :
– une grandeur en fonction d'une autre grandeur (et non pas en fonction du temps), exemple : θr=f(θm)
– un rapport entre deux grandeurs en fonction du temps, exemple : θr/θm=f(t)
– une combinaison de grandeurs, exemple tracé de la puissance électrique consommée par le moteur : Pélec=f(t) en traçant umoteur*imoteur=f(t)
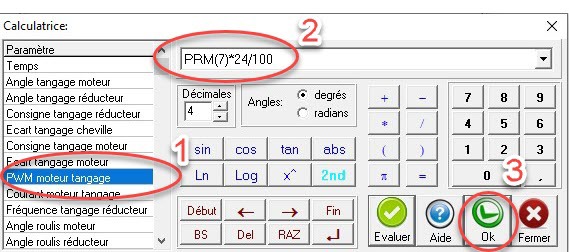
Or, à l'aide du logiciel, il est impossible d'obtenir la tension moteur directement. Il faut également créer la variable tension à l'aide de la formule : \(u_{mot}(t)=\frac{24PWM(t)}{100} \)(relation qui provient de la NB ci-dessous) :
NB : la commande PWM tracée n'est pas en point, mais en % (sachant que 100% correspond à la valeur maximale en entrée du hacheur, soit 27 points. Cette valeur maximale correspond à une tension d'alimentation du moteur de 24V).
Ainsi, cliquer sur l'onglet « Courbes de résultats ».
Puis, cliquer sur l'icône ![]() , et créer la variable tension comme ci-dessous :
, et créer la variable tension comme ci-dessous :