Choix de la structure à piloter (BO/BF) et définition des correcteurs et de l'entrée
Cliquer sur l'icône « Réalisation de mesures » ;

Choix de la structure à piloter
Sur ce système, il est possible de piloter 5 structures :
Essai possible | Structure à piloter | Notation dans le logiciel | Entrée à renseigner | Schéma-blocs associés |
|---|---|---|---|---|
Essai en boucle fermée (BF) | Avec asservissement (prise en compte du retour capteur au niveau de la cheville, et de la correction apportée par l'unité de commande) | Asservissement cheville | Consignes de position angulaire des axes |
|
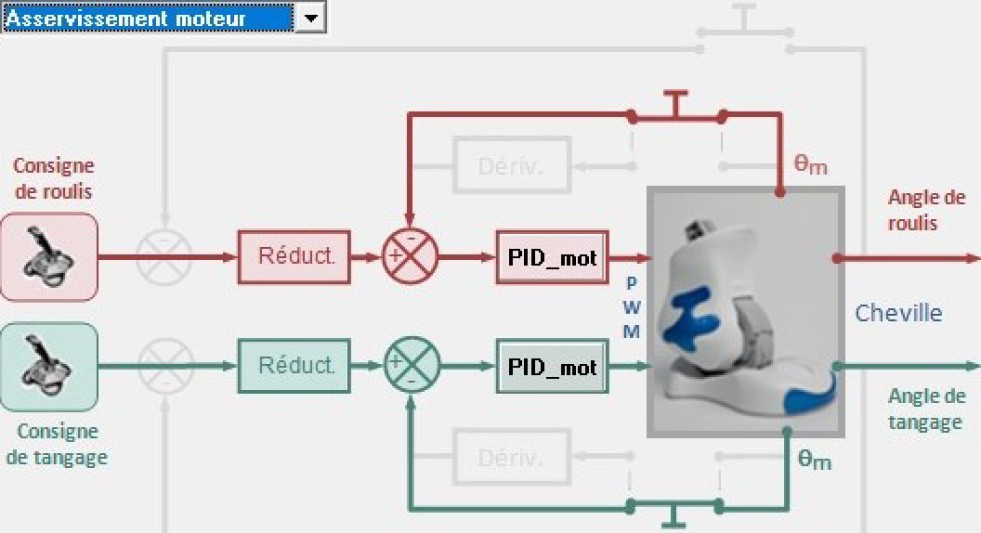
Avec asservissement (prise en compte du retour capteur au niveau du moteur, et de la correction apportée par l'unité de commande) | Asservissement moteur |
| ||
Avec asservissement (prise en compte du retour des capteurs au niveau du moteur et de la cheville, et des corrections apportées par l'unité de commande) | Asservissement double |
| ||
Essai en boucle ouverte (BO) | Sans asservissement (pas de retour capteur envoyé à l'unité de commande) mais prise en compte du bloc correcteur | Boucle ouverte | Consignes de position angulaire des axes |
|
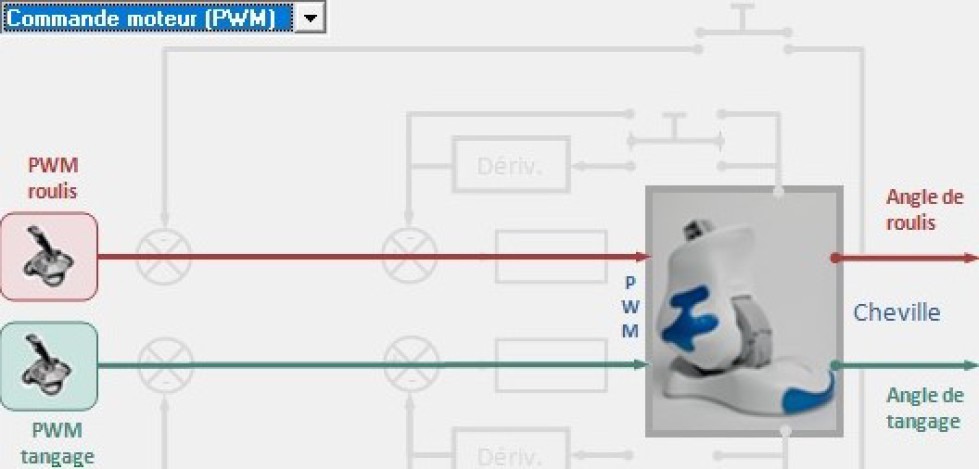
Sans asservissement (pas de retour capteur envoyé à l'unité de commande) | Commande moteur (PWM) | Commandes numériques PWM à l'entrée des hacheurs |
|



Pour choisir la structure à piloter, cliquer sur l'onglet « Commande et mesures », puis dans la partie droite de la fenêtre, sélectionner la structure à piloter :
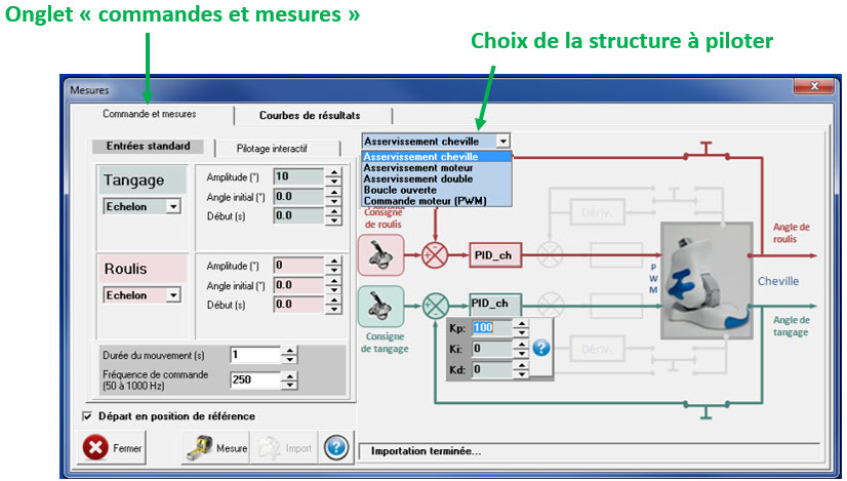
NB : Le schéma affiché en arrière plan illustre la structure choisie.
Définition des correcteurs (lorsqu'ils sont utilisés dans la structure)

Les zones "PID" permettent de définir les correcteurs lorsqu'ils sont utilisés lors de pilotage en BF.
Chaque correcteur a pour fonction de transfert \(C(p)=\frac{1}{648} \left( K_p+\frac{K_i}{p}+K_d p \right)\) avec :
-\(K_p\) gain proportionnel ;
-\(K_i\) gain intégral ;
-\(K_d\) gain dérivé.
Le réglage de chaque correcteur (valeurs de \(K_p , K_i , K_d\)) doit être renseigné selon les les valeurs données dans le TP.
Sinon, saisir les valeurs du réglage par défaut :\(K_p=600 , K_i=20 , K_d=0\)
Définition de l'entrée
Voir tableau en haut de la page afin de connaître la grandeur en entrée de l'essai.
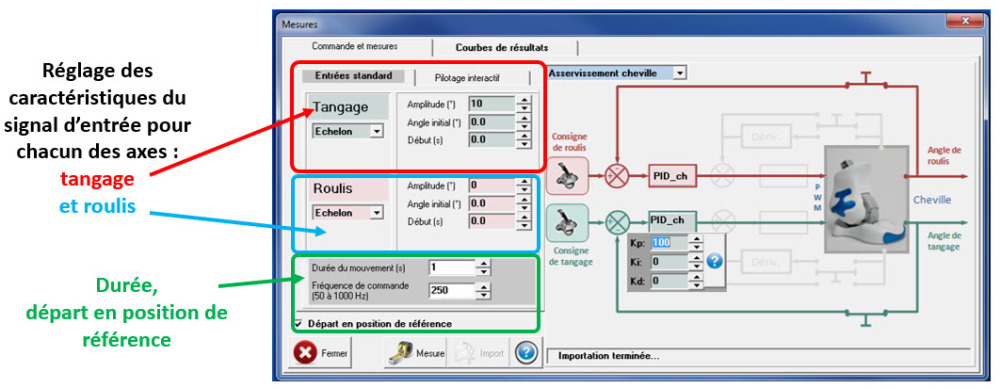
Puis, pour chaque axe (« Tangage » et « Roulis »), définir les caractéristiques de l'entrée (forme, amplitude, position initiale, instant où cette entrée est envoyée).
NB : en boucle ouverte « Commande moteur (PWM) » c'est à dire avec entrée "Commandes numériques PWM", la commande numérique PWM doit être saisie en % (sachant que 100% correspond à la valeur maximale en entrée du hacheur, soit 27 points. Cette valeur maximale correspond à une tension d'alimentation du moteur de 24V).
Sélectionner également la durée du mouvement, ainsi que sa position de départ (si oui ou non, c'est la position de référence) ;
Si vous utilisez un seul axe, sélectionner l'entrée "aucun" pour l'axe inutilisé, au lieu de saisir un échelon d'amplitude 0°.